



单天线FMCW雷达发射泄漏信号抑制技术研究
2025-08-19 来源:21ic
由于受到体积、重量、成本等限制,多数连续波体制的雷达导引头采用单天线技术,由于收发隔离不足致使发射信号泄漏到接收机中产生泄漏信号,而信号泄漏会导致连续波体制雷达接收机灵敏度下降,中放、微波混频器或前置低噪声放大器饱和。
随着元器件的发展,毫米波前端器件的饱和功率,如混频器,可到十几dBm以上,而在弹载环境中,连续波发射机功率一般为几百mW,因此,饱和不是主要问题,只需重点解决接收机灵敏度下降的问题。同时,考虑到实际信息过程具有不确定性,本文采用自适应数
字对消技术综合处理该信息过程,并使得由于收发隔离不足导致的发射泄漏信号得到最大限度的抑制。
1 自适应数字对消基本原理
自适应数字对消系统工作原理如图1所示。
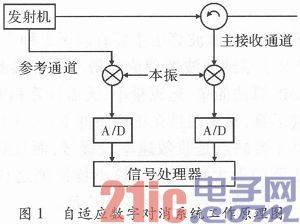
在该模型中,接收机有两个独立通道,参考接收通道和主接收通道。参考通道对发射信号进行采样,主接收通道包含发射泄漏信号和目标回波信号。将主回波信号和参考信号分别送入中频自适应数字对消器,两通道所接收到的信号幅度和相位不同,为提取有用的目标反射信号,只需调整接收到的参考信号,使其与主路信号中发射泄漏信号一致,从而获得良好的对消效果。
自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。对消原理框图如图2所示。
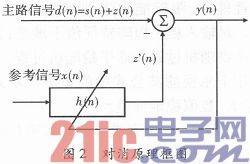
设主回波信号d(n)为目标回波信号s(n)与发射泄漏信号z(n)之和,x(n)为参考信号,x(n)与目标回波信号不相关,但与z(n)具有某种未知的相关性,x(n)经滤波后产生和z(n)相似的信号z’(n),最终得到系统的输出
y(n)=s(n)+z(n)-z’(n) (1)
假设z(n)、x(n)及s(n)是零均值的平稳随机过程。s(n)与z(n)不相关。而
y2(n)=s2(n)+(z(n)-z’(n))2+2s(n)(z(n)-z’(n)) (2)
对式(2)两边取数学期望,由于s(n)与z(n)、x(n)不相关,s(n)与z’(n)也不相关,故
E[y2(n)]=E[s2(n)]+E[(z(n)-z’(n))2] (3)
信号功率E[s2(n)]与自适应滤波器的调节无关,因此,自适应滤波器调节使E[y2(n)]最小,即E[(z(n)-z’(n))2]最小。又因为z(n)-z’(n)=y(n)-s(n),所以当E[(z(n)-z’(n))2]最小时,自适应泄漏信号抵消系统的输出信号y(n)与有用信号s(n)的均方差E[(y(n)-s(n))2]也最小,在理想情况下,z(n)=z’(n),则y(n)=s(n)。
但在实际系统中,从天线接收到的信号比理论分析复杂,对消比较低。
自适应滤波器本身有一个重要的自适应算法,该算法可以根据输入、输出及原参量值,按照一定准则修改滤波参量,以使自适应滤波器能有效地跟踪外部环境的变化。
目前,自适应滤波算法主要有以下3种:
(1)基于维纳滤波器理论的最小均方误差(LMS)算法。LMS算法简单、运算量小、无需计算相关函数和矩阵求逆运算,易实现且在正确条件下,可获得满意的性能。其主要缺点是收敛速率较缓慢,而且对抽头输入相关矩阵的最大特征值与最小特征值之比变化敏感,即使这样,LMS算法仍然应用广泛。
(2)基于最小二乘法的递推最小二乘法(RLS)算法。RLS算法的优点是收敛速度快、跟踪能力强,但其由于要进行矩阵求逆,计算量较LMS算法大得多,这使其应用受到限制。
(3)基于卡尔曼滤波理论的卡尔曼算法。卡尔曼算法收敛性能好、跟踪能力强、收敛速率具有鲁棒性(Robust)。对输入相关短阵特征值不敏感;并且,该算法适用于平稳随机过程和非平稳随机过程。主要缺点是直接使用卡尔曼滤波公式中的矩阵表示式,算法复杂、运算量大、数值稳定性差。
本文选择LMS算法完成自适应数字对消。
2 理论数据仿真分析
仿真结果如图3和图4所示。
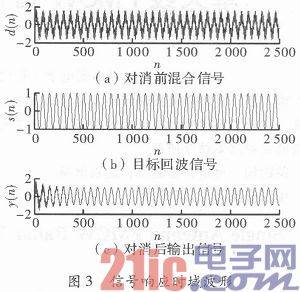
图3(a)中表示主回波信号d(n),图3(b)表示目标回波信号s(n);图3(c)表示对消后输出信号,可以看出,经过一段时间的自适应调整,对消后的输出信号以看不到发射泄漏信号,由此可见,该系统对发射泄漏信号有较好的对消效果,波形失真小。
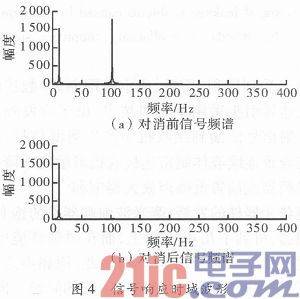
图4是信号响应的时域波形,图4(a)为对应主回波信号d(n)的频域图形;图4(b)为对应对消后输出信号的频域图形,经对比可知,泄漏信号减小约40 dB。
3 实采数据仿真分析
实采数据中,发射泄漏信号与参考信号均为20 MHz的正弦波,目标回波信号为21 MHz的正弦波,数据采样率为200 MHz。信号响应时域波形如图5所示。
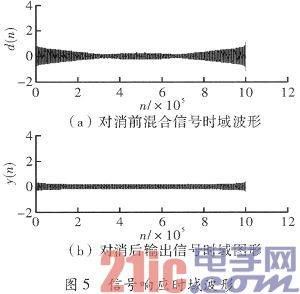
图5(a)表示主回波信号d(n);图5(b)表示对消后输出信号,可以看出,对消后的输出基本可还原目标回波信号,波形失真小。
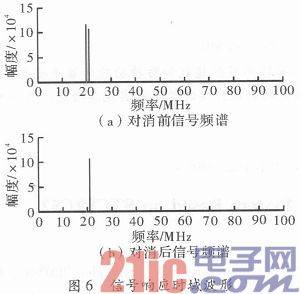
图6为图5所示信号对应的频域图形,经对比可知,泄漏信号减小约32.2 dB。
4 结束语
本文基于理论分析和实验验证,针对3 mm调频连续波雷达发射信号泄漏问题,通过自适应数字对消技术,可以准确灵活、有效地减小发射泄漏信号,降低了泄漏信号对接收机灵敏度的影响。理论仿真与实验测试结果证明该方法有效可行。
上一篇:跨阻放大器须知――第1部分
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- Mujoco中添加Apriltag标签并实现相机识别教程
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- 中国芯片研发重要成果!中科院发布香山、如意系统
- Miniconda环境隔离教程:解决Python版本冲突的完整指南
- Jetson GPU Burn烤机测试与PTX编程详解
- LabelImg安装使用教程:YOLOv12训练数据标注完整指南
- 根据题意,水位上升记为正,下降记为负。汛期水位上升3分米(即0.3米)记作+3分米,此时达到最高水位12.5米,因此基准水位(记作0时的水位)为: 12.5米 - 0.3米 = 12.2米。 汛期过后水位下降4分米(即0.4米),是从最高水位下降,故实际水位为: 12.5米 - 0.4米 = 12.1米。 实际水位相对于基准水位的变化量为: 12.1米 - 12.2米 = -0
- YOLOv12训练实战:train.py常用参数详解
- Altera 与 Arm 深化合作,共筑 AI 数据中心高效可编程新方案
- 莱迪思加入英伟达 Halos生态系统,通过Holoscan传感器桥接技术提升物理人工智能安全性
- 芯科科技闪耀2026嵌入式世界展 以Connected Intelligence赋能,构建边缘智能网联新生态
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

锂离子/锂聚合物USB电池充电器
-

6晶体管H桥
-

AVR LCD温度计—LM35
-

AVR PC步进电机驱动器
-

AVR温度计TCN75
-

JDM2 PIC 18F 编程器