



复杂约束下自动驾驶车辆的运动规划解析
2024-12-11 来源:elecfans
01什么是MotionPlanning
Motion Planning是在遵循道路交通规则的前提下,将自动驾驶车辆从当前位置导航到目的地的一种方法。
在实际开放道理场景下,自动驾驶要处理的场景非常繁杂:空旷的道路场景、与行人、障碍物共用道理的场景、空旷的十字路口、繁忙的十字路口、违反交通规则的行人/车辆、正常行驶的车辆/行人等等。场景虽然复杂,但都可以拆解为一系列简单行为(behavior)的组合:
将这些简单的行为(behavior)组合起来,就可以完成复杂的驾驶行为。
02Motion Planning的约束条件(constraints)
Motion Planning是一个复杂的问题,它的执行过程需要满足很多约束条件:
2.1 车辆运动学约束
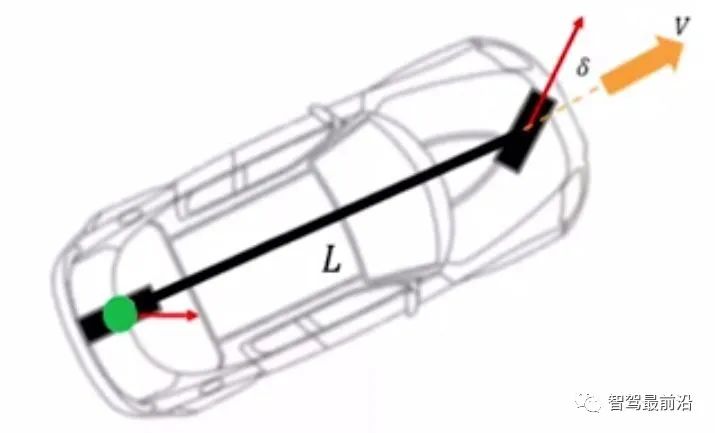
车辆运动受到运动学约束,比如它不能实现瞬时侧向移动,前驱的车辆必须依赖前轮的转向才能实现变道、转向等操作,在弯道上不能速度过快等等。通常我们采用单车模型(Bicycle Model)对车辆运动进行建模。
2.2 静态障碍物(Static Obstacle)约束
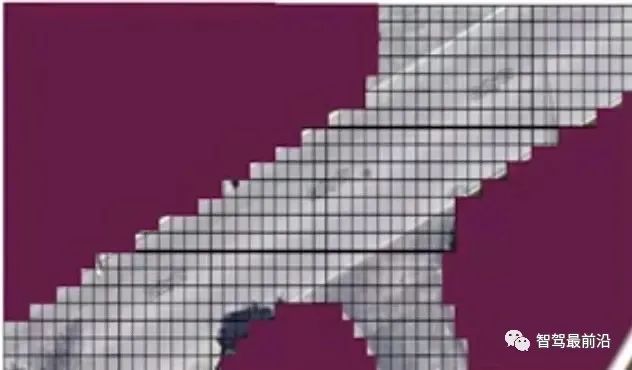
静态障碍物(Static Obstacle)是道路上静止的车辆、路面中间的石墩子等车辆不可行驶的区域。Motion Planning需要避开这些静态障碍物,避免与它们发生碰撞。解决碰撞的思路大概有两种:
1)将静态障碍物(Static Obstacle)在网格占位图中表示出来,然后检测规划路线是否与静态障碍物区域相交。
2)将车辆的轮廓扩大,比如扩展成一个圆形,然后检测障碍物是否与Circle发生碰撞。
2.3 动态障碍物约束
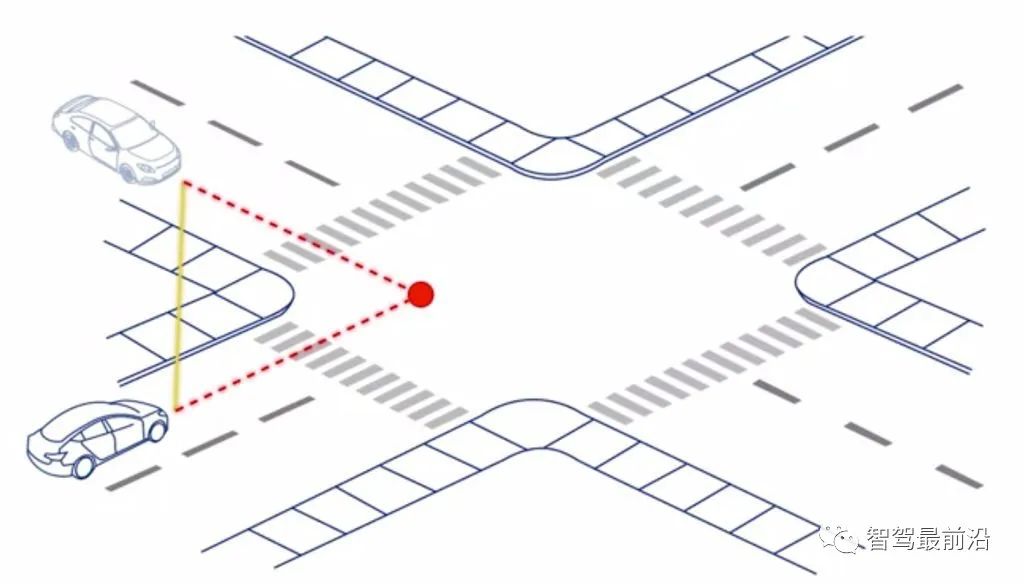
Motion Planning要实时处理行人、车辆等各种运动的障碍物,避免与障碍物发生碰撞事故。
2.4 道路交通规则约束
车辆在道路上行驶必须要遵守车道线约束规则(比如左转专用道只能左转、实线不能变道、路口必须遵守红绿灯的指示)和各种标志标牌的指示。

03Motion Planning的优化目标
了解Motion Planning的约束条件之后,需要构造目标优化函数,然后最小化目标函数,从而获得在当前环境下的最优运动轨迹。目标函数的种类有很多,下面枚举一些常用的目标函数。
1)关注路径长度(Path Length),寻求到达目的地的最短路径。
2)关注通行时间(Travel Time),寻求到达目的地的最短时间。
3)惩罚偏离参考轨迹和参考速度的行为。
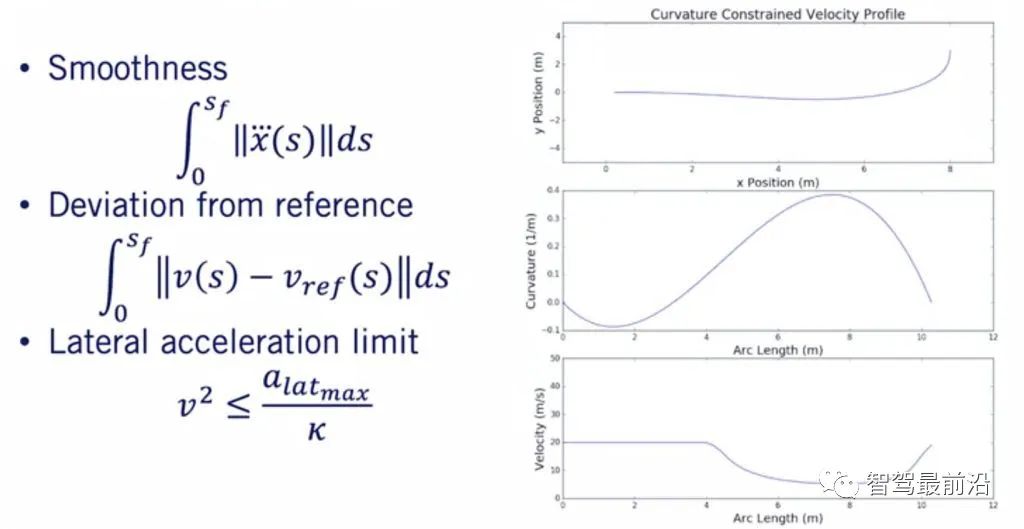
4)考虑轨迹平滑性(Smoothness)
5)考虑曲率约束(Curvature)
通过组合设计自己的目标优化函数,从而获得较好的Planning效果。
04分级运动规划器
Motion Planning是一个异常复杂的问题,所以通常我们把它切分为一系列的子问题(Sub Problem)。比如Mission Planner、Behavior Planner、Local Planner、Vehicle Control等。

4.1 Mission Planner
Mission Planner关注High-Level的地图级别的规划;通过Graph Based的图搜索算法实现自动驾驶路径的规划。

4.2 Behavior Planner
Behavior Planner主要关注交通规则、其它道路交通参与者(自行车、行人、社会车辆)等等,决定在在当前场景下应该采取何种操作(如停车让行、加速通过、避让行人等等)。
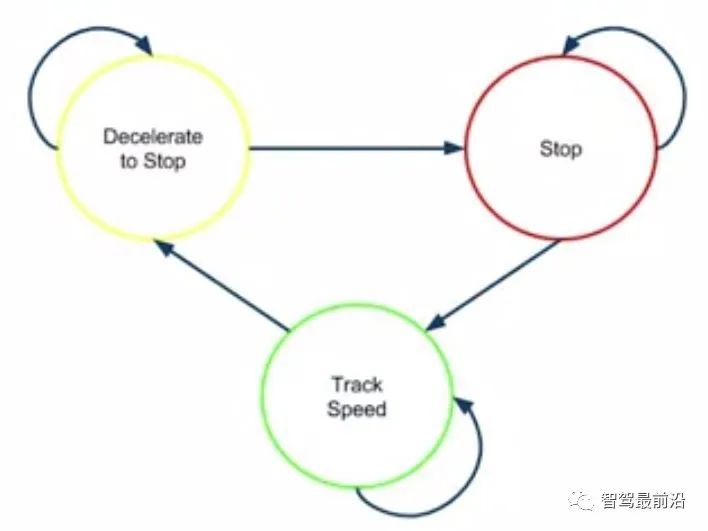
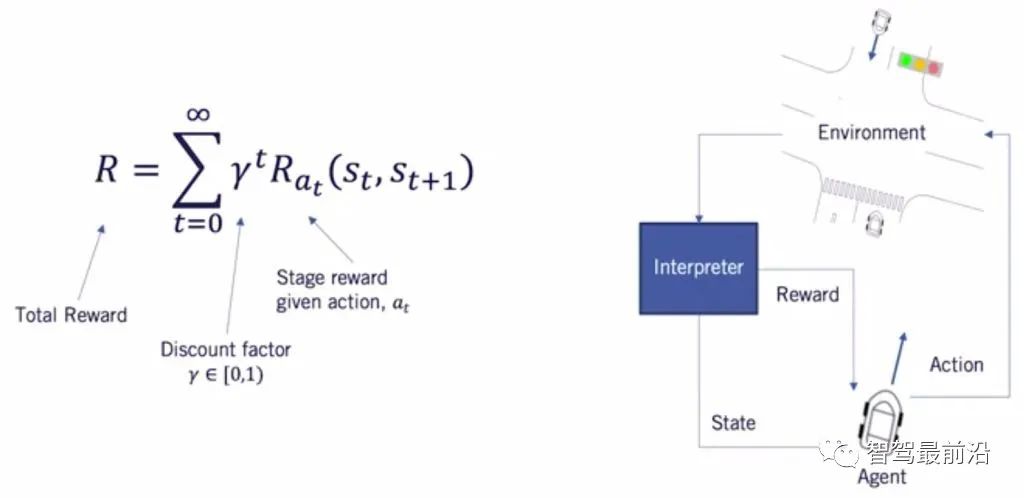
Behavior Planner的实现方式比较常见的有几种:有限状态机(Finite State Machines)、规则匹配系统(Rule Based System)、强化学习系统(Reinforcement Learning)。
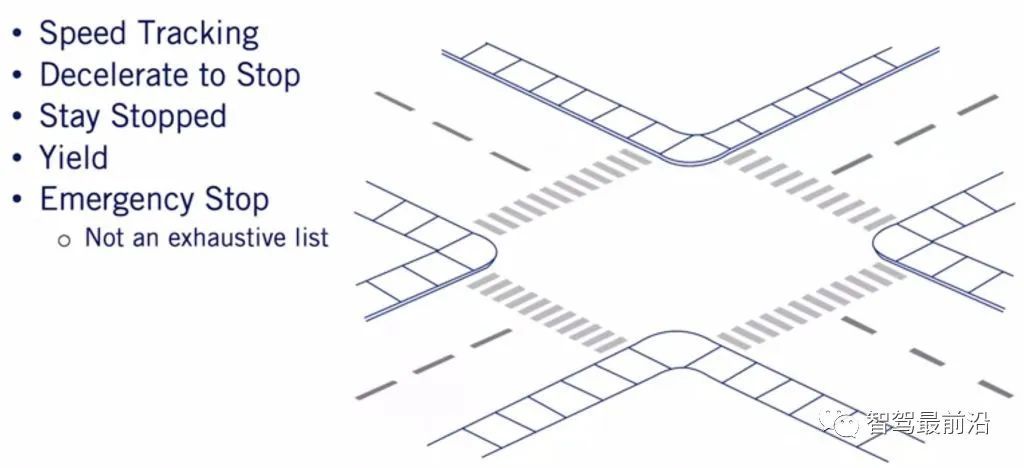
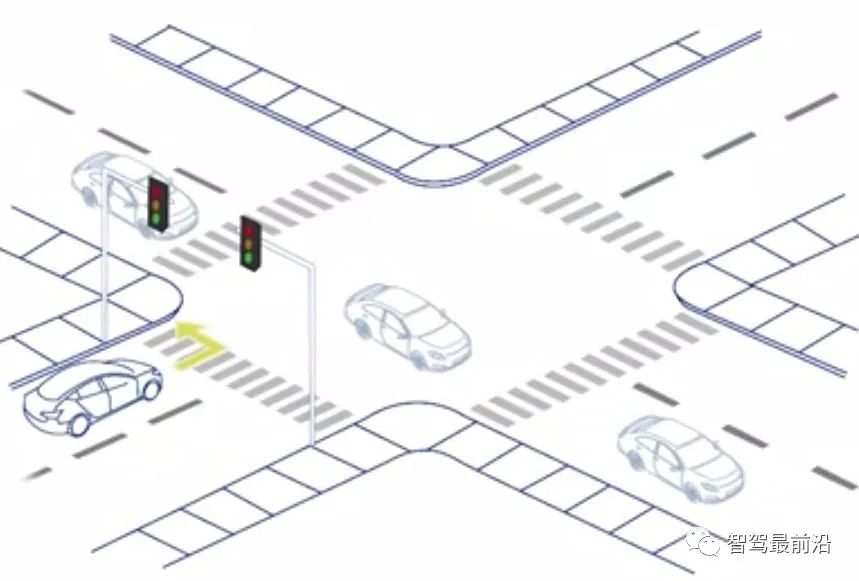
有限状态机中的State是各个行为决策,根据对外界环境的感知和交通规则的约束在各个状态之间转换。比如在路口红绿灯的场景,当路口交通灯为红色不可通行时,车辆会首先切换到Decelerate to Stop状态,然后在路口停止线完全停下来,进入Stop状态,并持续在Stop状态等待,直至交通灯变为绿色允许车辆通行,车辆进入Track Speed状态,继续前行。
Rule-Based System是通过一系列的分级的规则匹配来决定下一步的决策行为。比如交通灯绿色->通行;交通灯红色->停车等待。

基于强化学习的Behavior Planner系统如下:
4.3 Local Planner
Local Planner关注如何生成舒适的、碰撞避免的行驶路径和舒适的运动速度,所以Local Planner又可以拆分为两个子问题:Path Planner和Velocity Profile Generation。Path Planner又分为Sampling-Based Planner、Variational Planner和Lattice Planner。
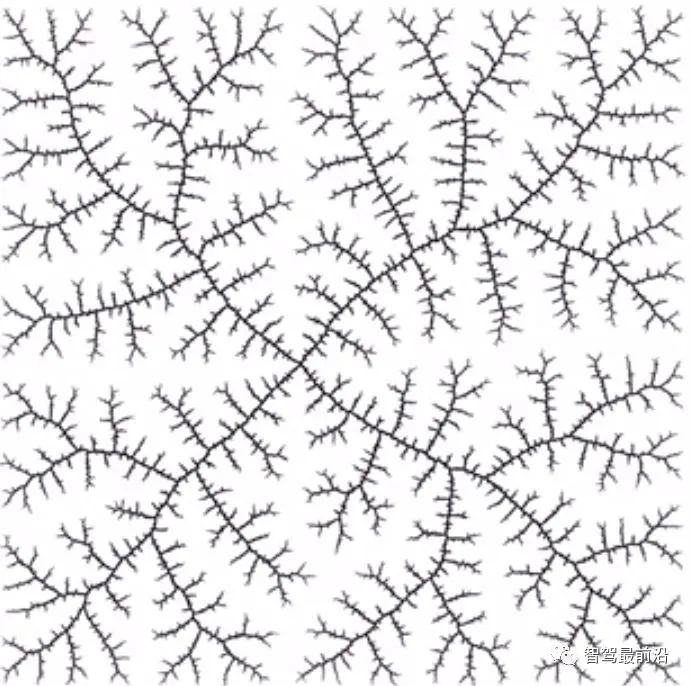
最经典的Sampling-Based Planner算法是Rapidly Exploring Random Tree,RRT算法。
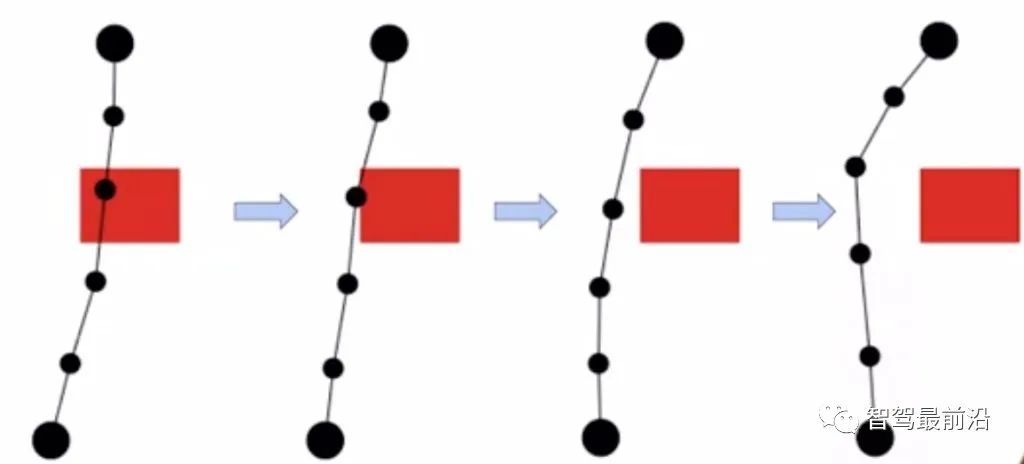
Variational Planner根据Cost Function进行优化调整,从而避开障碍物,生成安全的轨迹。
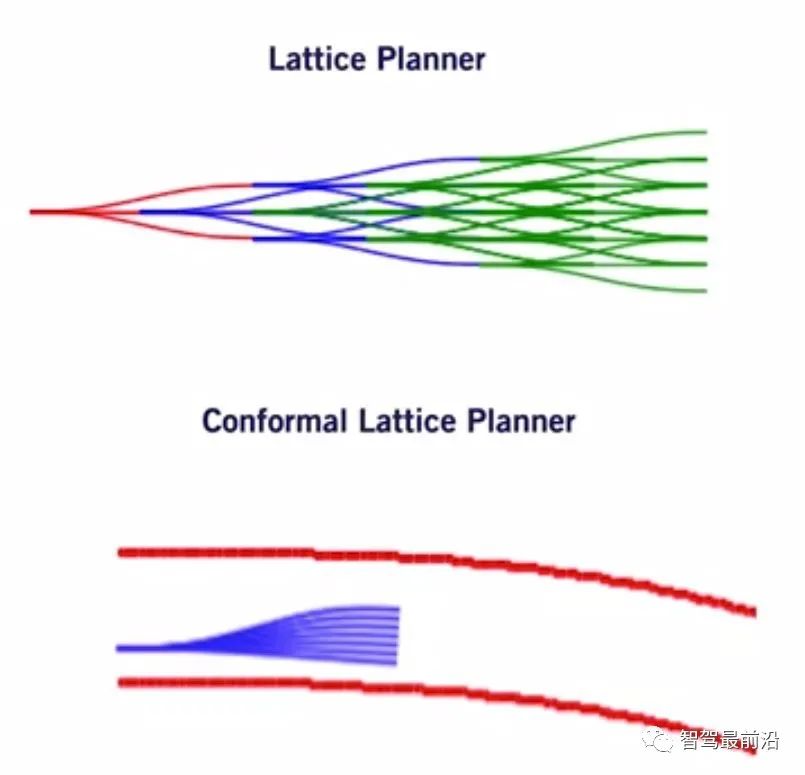
Lattice Planner将空间搜索限制在对车辆可行的Action Space。
Velocity Profile Generation要考虑到限速、速度的平滑性等。
Vehicle Control将Planner的规划结果转化为车辆的运动行为。
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- Mujoco中添加Apriltag标签并实现相机识别教程
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- Altera 与 Arm 深化合作,共筑 AI 数据中心高效可编程新方案
- 莱迪思加入英伟达 Halos生态系统,通过Holoscan传感器桥接技术提升物理人工智能安全性
- 芯科科技闪耀2026嵌入式世界展 以Connected Intelligence赋能,构建边缘智能网联新生态
- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外开关
-

12V转110V/220V 500W逆变器
-

DS1669数字电位器