



星际探测新工具,模块化跳跃机器人
2025-02-13

在浩瀚的宇宙中,人类对未知的探索从未停止。随着航天技术的不断发展,行星探测任务日益频繁。
然而,传统探测器如火星车,虽然功能强大,但体积庞大、重量沉重,移动缓慢,这大大限制了它们的探测范围和效率。例如,NASA的“好奇号”火星车重达900公斤,日均移动距离仅百米级。无人机则依赖大气飞行,无法在低重力环境(如月球、小行星)上使用,且能耗高、续航短。跳跃式机器人机动性好,但飞行阶段姿态稳定性差。
为解决这一问题,加州大学洛杉矶分校(UCLA)机器人与机械实验室(RoMeLa)提出一种基于模型预测控制器(MPC)的惯性变形机制,用于调节机器人进行方向和提高其稳定性。惯性变形机制利用了贾尼别科夫效应(又称中间轴定理或网球拍效应),通过两个机器人的协同运动调节系统惯性矩,取代传统飞轮或推进器,实现轻量化、高能效的稳定控制。
SPLITTER的核心设计
在此背景下,研究人员研发了一款名为SPLITTER(Space and Planetary Limbed Intelligent Tether Technology Exploration Robot)的创新模块化机器人系统,为行星探测领域带来了划时代的变革。
它由两个四足机器人(各<10 kg)通过系绳连接,形成哑铃状结构,四肢兼具行走与跳跃功能,系绳可动态调整长度以改变系统惯性。这种模块化设计不仅减轻了机器人的重量,还提高了其适应复杂地形的能力。
SPLITTER的跳跃储能机制是其另一大亮点。通过旋转储能实现连续跳跃,每次跳跃都能积累能量加速,从而提升了移动效率。同时,利用惯性变形调整四肢位置和系绳长度,结合模型预测控制器(MPC)实时优化飞行姿态,以最小能量消耗实现姿态稳定(如俯仰角、偏航角收敛至目标值),确保了机器人在跳跃过程中的稳定性。
创新优势与应用场景
SPLITTER的创新优势在于其质量效率高、适应低重力环境、具有群体部署潜力以及技术通用性。省去传统姿态控制硬件,如反作用轮、气体推进器,降低了系统重量和复杂度,使其更适合航天器严苛的重量限制。
跳跃步态在微重力下更高效,系绳可辅助锚定,扩展了探测范围。多机器人协同可覆盖广阔区域,尤其适合地形复杂、未知的行星表面。例如一个半SPLITTER可以进入陨石坑或洞穴,而另一侧则锚定以提供支撑。此外,MPC惯性变形控制还可应用于卫星、航天器等其他太空设备,提升稳定性。
未来研究方向
尽管SPLITTER已经取得了显著的成果,但其研发团队并未止步。他们计划在高保真模拟环境中测试MPC算法,优化姿态控制性能;开发高功率密度执行器与轻量化传感器,提升机器人运动能力与环境感知;模拟月球尘埃、极端温度等条件,验证系统可靠性;以及研究多SPLITTER协同探测策略,优化资源分配与路径规划。
展望未来
SPLITTER通过模块化设计、系绳跳跃机制与惯性变形控制,为行星探测提供了一种轻量化、高机动性的解决方案,突破了传统探测器的局限性。未来若成功部署,SPLITTER有望大幅提升人类对月球、小行星等天体的探测效率,并为深空探索机器人技术开辟新方向。
SPLITTER的研发不仅展示了人类在探索宇宙方面的智慧和勇气,更为我们揭示了未来行星探测的无限可能。随着技术的不断进步和创新,相信在不久的将来,人类将能够更深入地了解宇宙的奥秘。
-

直播回放: 如何使用MPLAB® Mindi™软件进行模拟电路仿真
-

直播回放: 开启 SDV 的未来:集成 TI 的远程控制边缘节点解决方案
-

直播回放: 2026 是德科技XR8新品发布: 一段跨越70年的示波器创新之旅
-

直播回放: 使用RUHMI模型转换器部署BYOM模型并进行MINST模型部署
-

直播回放: 使用Reality AI Tools 基于数据创建微小型AI模型以及进行拉弧检测开发实践
-

直播回放: MPS 赋能人形机器人 - 因为没有运动,机器人只是一尊雕塑
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
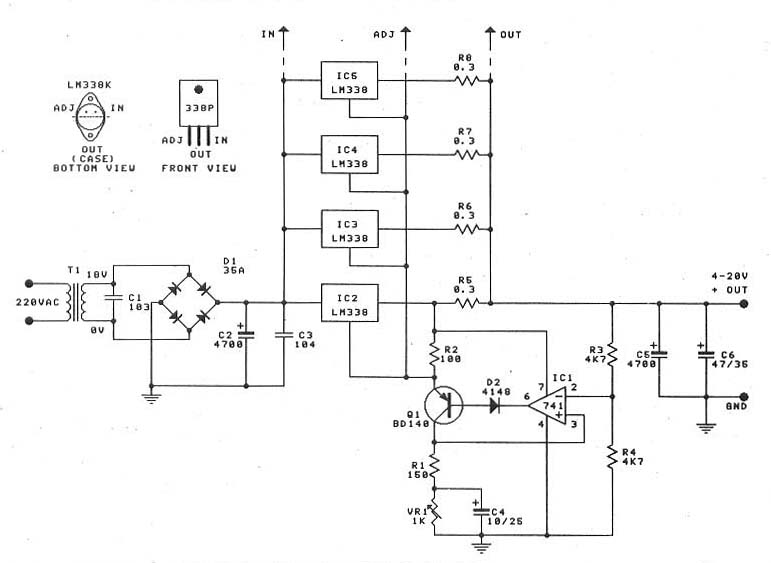
0-30V/20A 大功率稳压电源(采用LM338)