



处理自动往返循环控制电路常见故障的方法
2025-01-14 来源:elecfans
自动往返控制概述
自动往返控制定义 定义 自动往返控制是指通过控制器对执行机构进行自动控制,使得被控对象能够在两个或多个预定位置之间自动往返运动的一种控制技术。
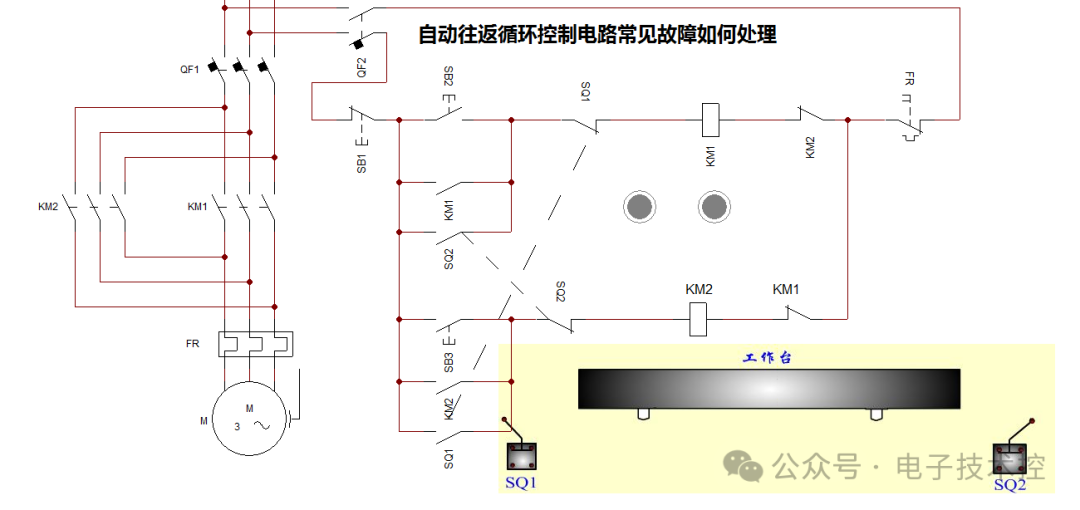
一、按下按钮SB2,正转正常,当工作台限位块碰到行程开关SQ1;交流接触KM线圈不能断电释放,导致不能停机造成事故。故障原因及解决办法如下:
1)接触器KM1粘连。停机检查更换接触器
2)行程开关SQ1常闭触点无法断开。使用万用表测量更换行程开关SQ1。
二、正转运行正常,当工作台限位块碰到行程开关S01.正转接触器KM1断电释放,而反转接触器KM2不吸合,工作台停止移动。故障原因及解决办法如下:
1)行程开关SQ1常开触点不能闭合或接触不良。可使用万用表测量排除此故障。
2)行程开关SQ2常闭触点断路,可以使用万用表测量如损坏更换SQ2
3)反转接触器KM2线圈断线,更接触器。
4)联锁触点(KM1的常闭触点)断开或者接触不良。
三、正转正常,当转换为反转时,工作台向反方向移动一段距离,便停止下来。故障
原因为反转接触器KM2的自锁触点有问题检查更换此触点。
四、正转或反转均无法操作,工作台不移动。此故障原因及解决办法如下:
1)控制回路没有电源断路器QF2损坏。
2)停止按钮SB1的常闭触点接触不良。
3)热继电器FR的常闭触点因过载动作断开。可人为手动复位或将触点短接,或更换热继电器FR。
五、正转运行正常,当转换到反转时,交流接触器KM2吸合,但电动机有翁翁声,或者反转正常正转时有嗡嗡声这是典型的缺相故障检查主回路
自动往返控制电路的原理是:当控制信号发出时,控制电路会自动改变控制信号的方向,从而实现自动往返控制。具体来说,自动往返控制电路由一个开关、一个接收器、一个发射器和一个控制电路组成。当控制信号发出时,开关会自动打开,接收器会接收到控制信号,发射器会发出反向的控制信号,控制电路会接收到反向的控制信号,从而实现自动往返控制。
下一篇:电动机配线如何选择
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- Mujoco中添加Apriltag标签并实现相机识别教程
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- 中国芯片研发重要成果!中科院发布香山、如意系统
- Miniconda环境隔离教程:解决Python版本冲突的完整指南
- Jetson GPU Burn烤机测试与PTX编程详解
- LabelImg安装使用教程:YOLOv12训练数据标注完整指南
- 根据题意,水位上升记为正,下降记为负。汛期水位上升3分米(即0.3米)记作+3分米,此时达到最高水位12.5米,因此基准水位(记作0时的水位)为: 12.5米 - 0.3米 = 12.2米。 汛期过后水位下降4分米(即0.4米),是从最高水位下降,故实际水位为: 12.5米 - 0.4米 = 12.1米。 实际水位相对于基准水位的变化量为: 12.1米 - 12.2米 = -0
- YOLOv12训练实战:train.py常用参数详解
- Altera 与 Arm 深化合作,共筑 AI 数据中心高效可编程新方案
- 莱迪思加入英伟达 Halos生态系统,通过Holoscan传感器桥接技术提升物理人工智能安全性
- 芯科科技闪耀2026嵌入式世界展 以Connected Intelligence赋能,构建边缘智能网联新生态
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

设计汽车集群电源
-

6晶体管H桥
-

USB自供电声卡
-

AVR LCD温度计—LM35
-

AVR PC步进电机驱动器
-

AVR温度计TCN75