



05_FreeRTOS中断管理
2025-09-05 来源:cnblogs
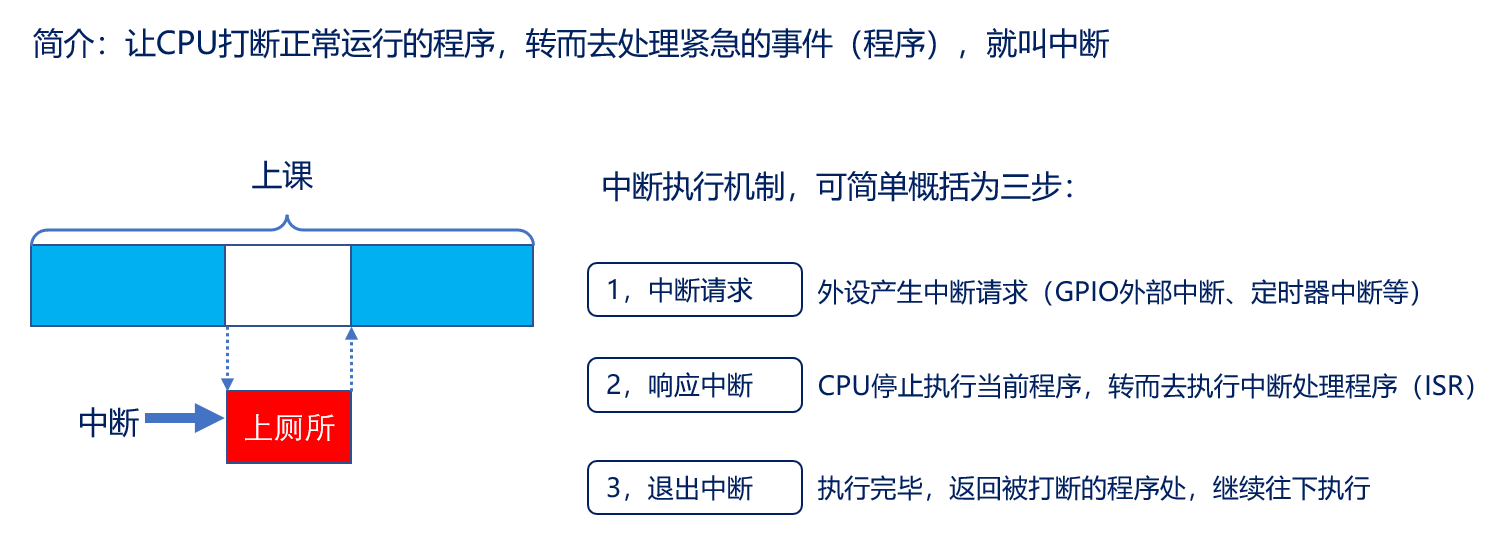
什么是中断?
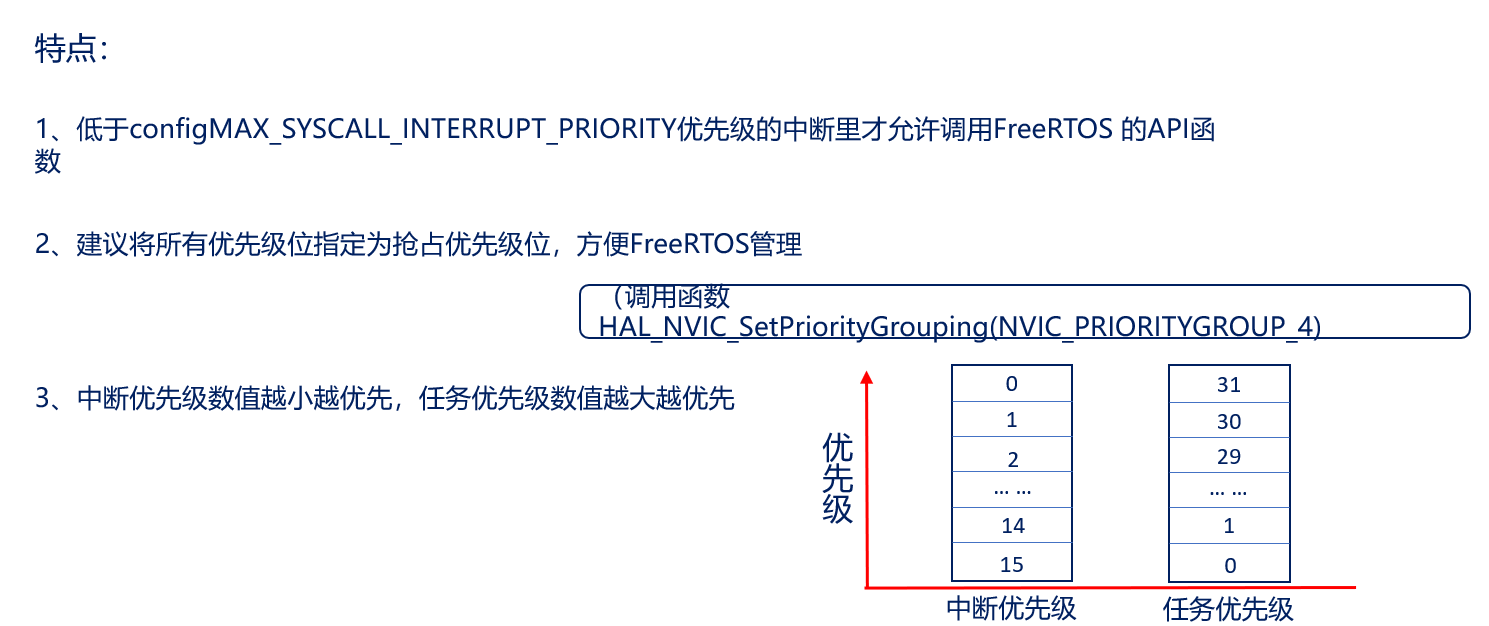
中断优先级分组设置
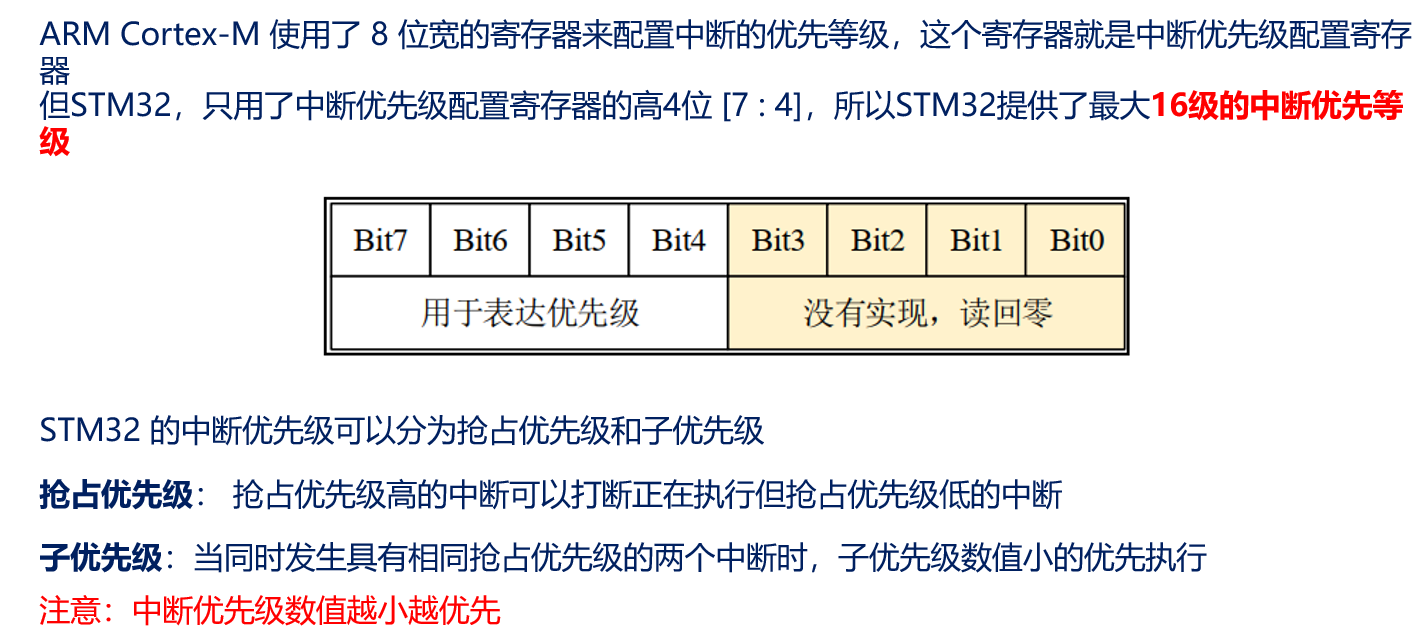
不同时发生具有相同抢占优先级的两个中断时,顺序执行

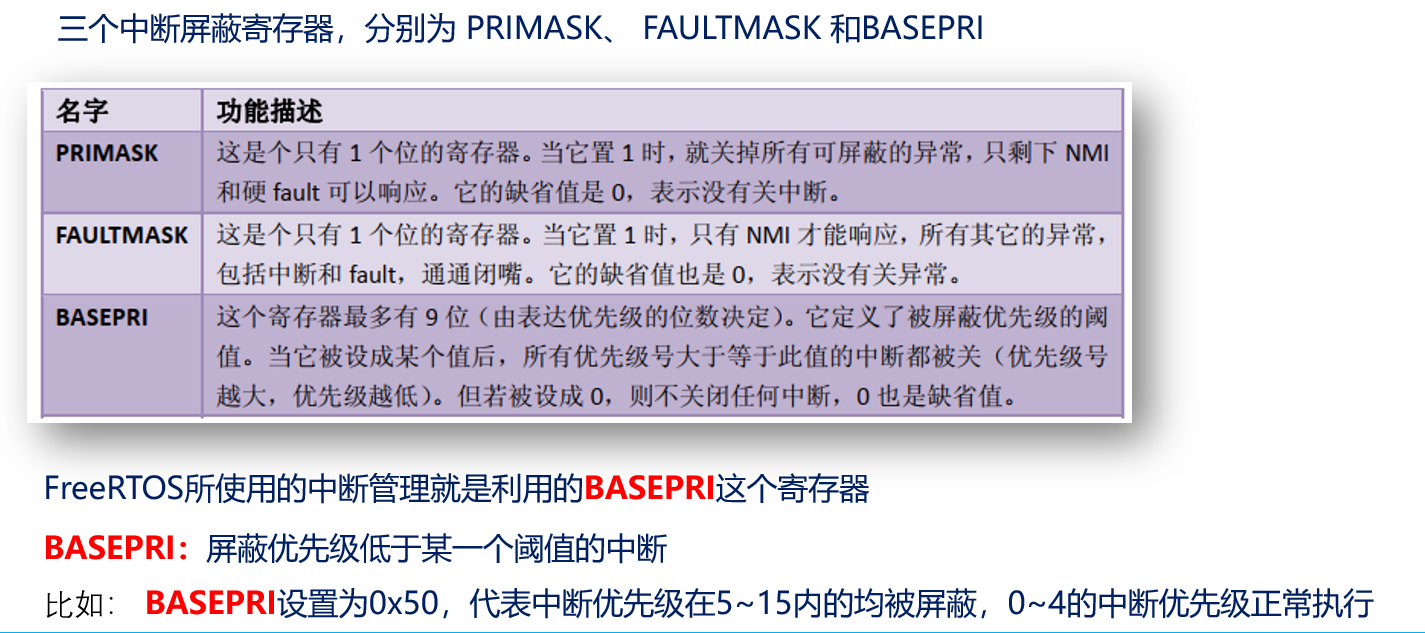
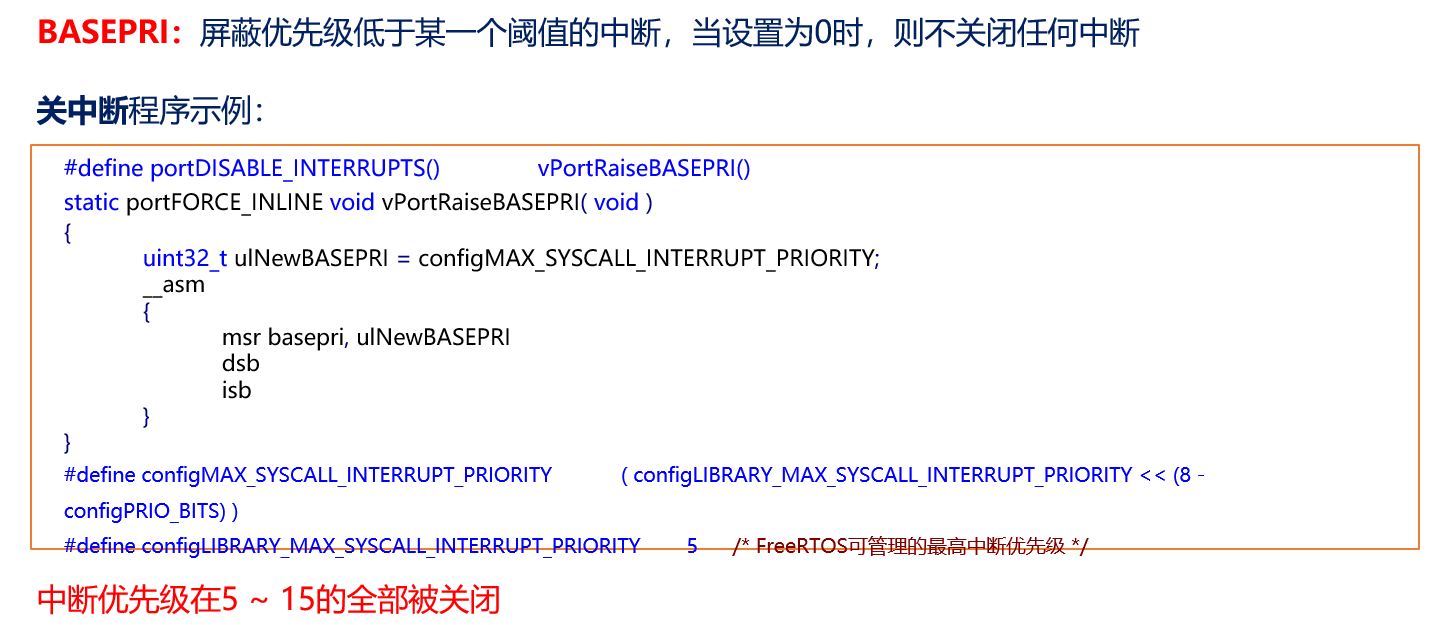
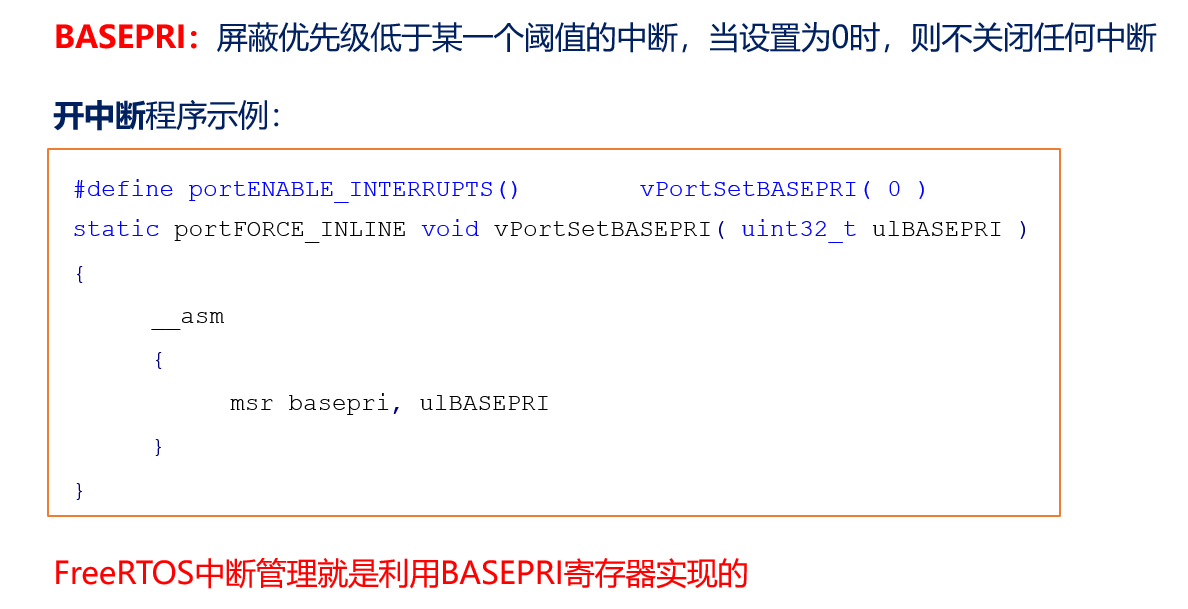
中断相关寄存器
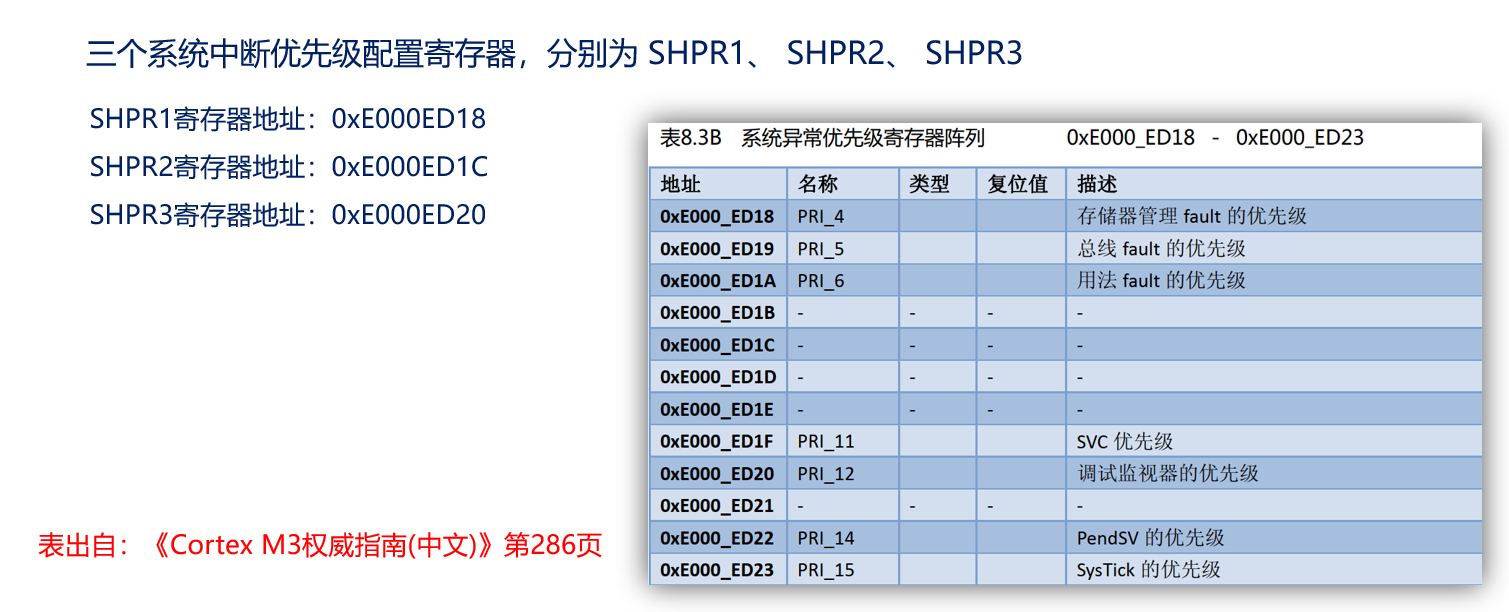
每个地址存储8位
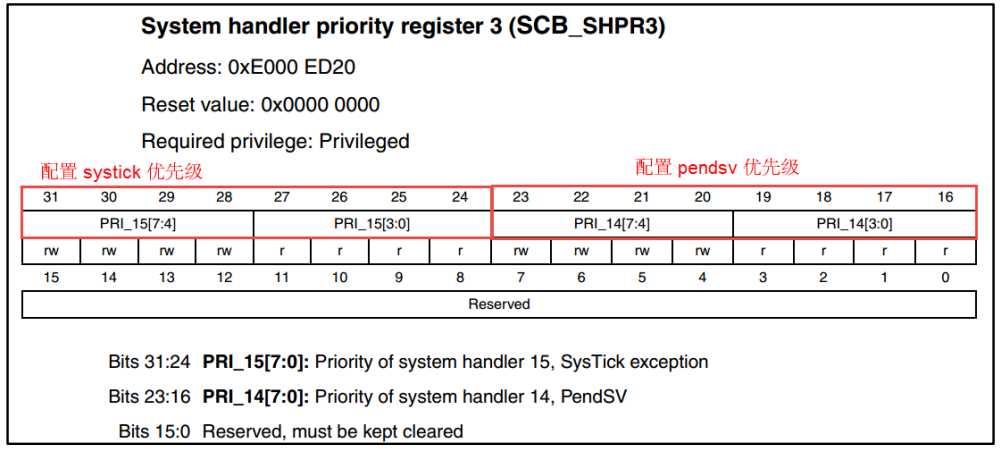
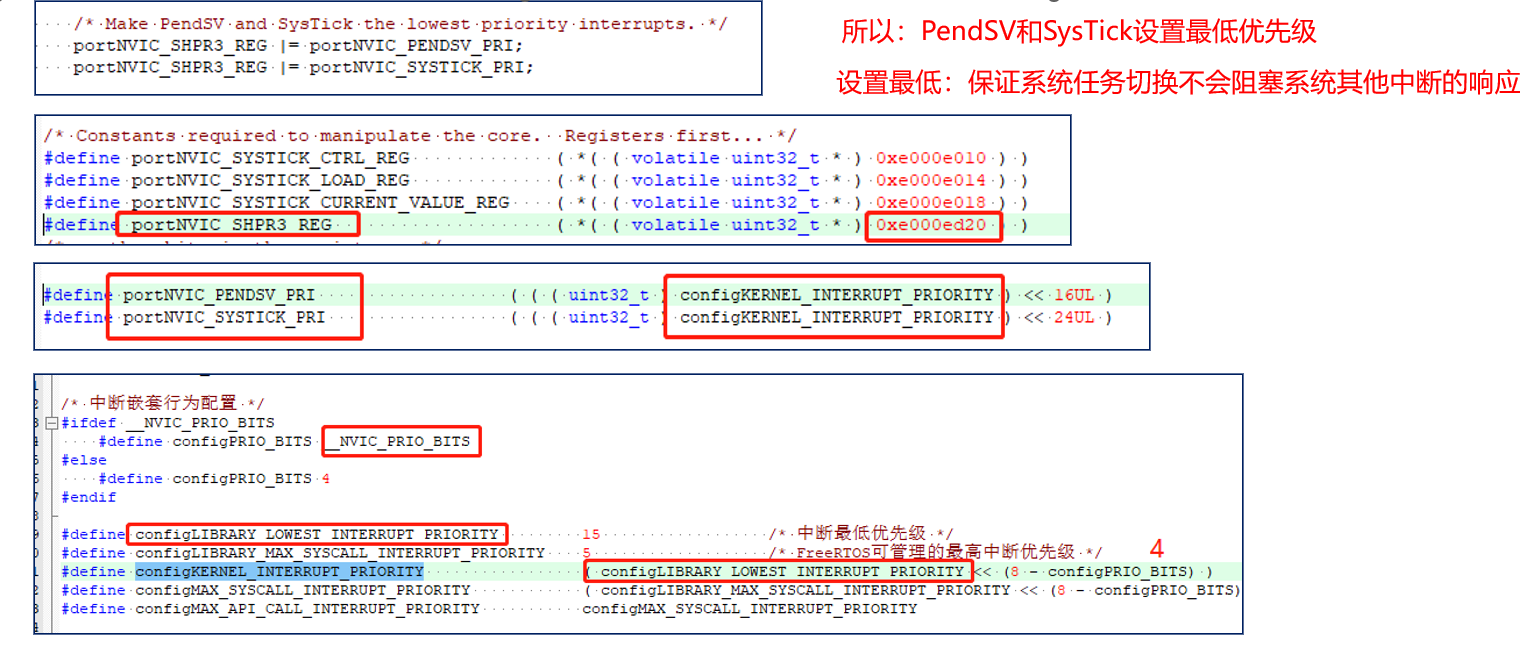
FreeRTOS如何配置PendSV和Systick中断优先级?

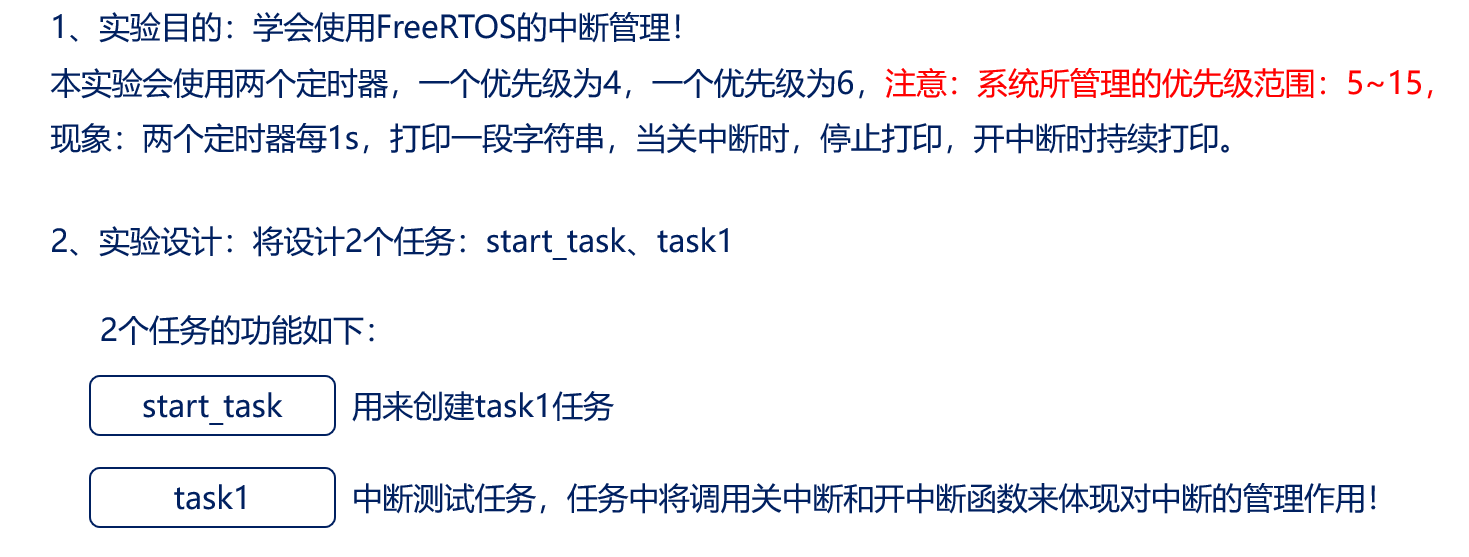
FreeRTOS中断管理实验
代码
btim.c
/**
****************************************************************************************************
* @file btim.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-15
* @brief 基本定时器 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者 F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211015
* 第一次发布
*
****************************************************************************************************
*/
#include './BSP/LED/led.h'
#include './BSP/TIMER/btim.h'
#include './SYSTEM/usart/usart.h'
TIM_HandleTypeDef g_timx_handler; /* 定时器参数句柄 */
TIM_HandleTypeDef g_tim7_handler; /* 定时器参数句柄 */
/**
* @brief 基本定时器TIMX定时中断初始化函数
* @note
* 基本定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候
* 基本定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft=定时器工作频率,单位:Mhz
*
* @param arr : 自动重装值。
* @param psc : 时钟预分频数
* @retval 无
*/
void btim_timx_int_init(uint16_t arr, uint16_t psc)
{
g_timx_handler.Instance = BTIM_TIMX_INT; /* 定时器x */
g_timx_handler.Init.Prescaler = psc; /* 分频 */
g_timx_handler.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */
g_timx_handler.Init.Period = arr; /* 自动装载值 */
HAL_TIM_Base_Init(&g_timx_handler);
HAL_TIM_Base_Start_IT(&g_timx_handler); /* 使能定时器x和定时器更新中断 */
}
/* TIM7初始化函数 */
void btim_tim7_int_init(uint16_t arr, uint16_t psc)
{
g_tim7_handler.Instance = BTIM_TIM7_INT; /* 定时器x */
g_tim7_handler.Init.Prescaler = psc; /* 分频 */
g_tim7_handler.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */
g_tim7_handler.Init.Period = arr; /* 自动装载值 */
HAL_TIM_Base_Init(&g_tim7_handler);
HAL_TIM_Base_Start_IT(&g_tim7_handler); /* 使能定时器x和定时器更新中断 */
}
/**
* @brief 定时器底层驱动,开启时钟,设置中断优先级
此函数会被HAL_TIM_Base_Init()函数调用
* @param 无
* @retval 无
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == BTIM_TIMX_INT)
{
BTIM_TIMX_INT_CLK_ENABLE(); /* 使能TIMx时钟 */
HAL_NVIC_SetPriority(BTIM_TIMX_INT_IRQn, 6, 0); /* 抢占6,子优先级0 */
HAL_NVIC_EnableIRQ(BTIM_TIMX_INT_IRQn); /* 开启ITMx中断 */
}
if (htim->Instance == BTIM_TIM7_INT)
{
BTIM_TIM7_INT_CLK_ENABLE(); /* 使能TIM7时钟 */
HAL_NVIC_SetPriority(BTIM_TIM7_INT_IRQn, 4, 0); /* 抢占4,子优先级0 */
HAL_NVIC_EnableIRQ(BTIM_TIM7_INT_IRQn); /* 开启ITM7中断 */
}
}
/**
* @brief 基本定时器TIMX中断服务函数
* @param 无
* @retval 无
*/
void BTIM_TIMX_INT_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_handler); /* 定时器回调函数 */
}
/* 基本定时器TIM7中断服务函数 */
void BTIM_TIM7_INT_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_tim7_handler); /* 定时器回调函数 */
}
/**
* @brief 回调函数,定时器中断服务函数调用
* @param 无
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == BTIM_TIMX_INT)
{
printf('TIM6正在运行rn');
}
else if (htim->Instance == BTIM_TIM7_INT)
{
printf('TIM7正在运行rn');
}
}
btim.h
/**
****************************************************************************************************
* @file btim.h
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-15
* @brief 基本定时器 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者 F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211015
* 第一次发布
*
****************************************************************************************************
*/
#ifndef __BTIM_H
#define __BTIM_H
#include './SYSTEM/sys/sys.h'
/******************************************************************************************/
/* 基本定时器 定义 */
/* TIMX 中断定义
* 默认是针对TIM6/TIM7
* 注意: 通过修改这4个宏定义,可以支持TIM1~TIM8任意一个定时器.
*/
#define BTIM_TIMX_INT TIM6
#define BTIM_TIMX_INT_IRQn TIM6_DAC_IRQn
#define BTIM_TIMX_INT_IRQHandler TIM6_DAC_IRQHandler
#define BTIM_TIMX_INT_CLK_ENABLE() do{ __HAL_RCC_TIM6_CLK_ENABLE(); }while(0) /* TIM6 时钟使能 */
#define BTIM_TIM7_INT TIM7
#define BTIM_TIM7_INT_IRQn TIM7_IRQn
#define BTIM_TIM7_INT_IRQHandler TIM7_IRQHandler
#define BTIM_TIM7_INT_CLK_ENABLE() do{ __HAL_RCC_TIM7_CLK_ENABLE(); }while(0) /* TIM7 时钟使能 */
/******************************************************************************************/
void btim_timx_int_init(uint16_t arr, uint16_t psc); /* 基本定时器 定时中断初始化函数 */
void btim_tim7_int_init(uint16_t arr, uint16_t psc); /* 基本定时器 定时中断初始化函数 */
#endif
main.c
/**
****************************************************************************************************
* @file main.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-11-04
* @brief 任务挂起和恢复 实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
*
****************************************************************************************************
*/
#include './SYSTEM/sys/sys.h'
#include './SYSTEM/usart/usart.h'
#include './SYSTEM/delay/delay.h'
#include './BSP/LED/led.h'
#include './BSP/LCD/lcd.h'
#include './BSP/KEY/key.h'
#include './BSP/SRAM/sram.h'
#include './MALLOC/malloc.h'
#include 'freertos_demo.h'
#include './BSP/TIMER/btim.h'
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
sram_init(); /* SRAM初始化 */
btim_timx_int_init(10000-1,8400-1);
btim_tim7_int_init(10000-1,8400-1);
my_mem_init(SRAMIN); /* 初始化内部SRAM内存池 */
my_mem_init(SRAMEX); /* 初始化外部SRAM内存池 */
my_mem_init(SRAMCCM); /* 初始化内部CCM内存池 */
freertos_demo();
}
freertos_demo.c
/**
****************************************************************************************************
* @file freertos.c
* @author 正点原子团队(ALIENTEK)
* @version V1.4
* @date 2022-01-04
* @brief FreeRTOS 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include 'freertos_demo.h'
#include './SYSTEM/usart/usart.h'
#include './BSP/LED/led.h'
#include './BSP/LCD/lcd.h'
#include './BSP/KEY/key.h'
#include './SYSTEM/delay/delay.h'
/*FreeRTOS*********************************************************************************************/
#include 'FreeRTOS.h'
#include 'task.h'
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_STACK_SIZE 128
#define START_TASK_PRIO 1
TaskHandle_t start_task_handler;
#define TASK1_STACK_SIZE 128
#define TASK1_PRIO 2
TaskHandle_t task1_handler;
void start_task( void * pvParameters );
void task1( void * pvParameters )
{
uint8_t task1_num = 0;
while(1)
{
if(++task1_num == 5)
{
task1_num = 0;
printf('关中断rn');
portDISABLE_INTERRUPTS();
delay_ms(5000);
printf('开中断rn');
portENABLE_INTERRUPTS();
}
vTaskDelay(1000);
}
}
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate(start_task, 'start_task', START_TASK_STACK_SIZE, NULL, START_TASK_PRIO, &start_task_handler);
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); //进入临界区
xTaskCreate(task1, 'task1', TASK1_STACK_SIZE, NULL, TASK1_PRIO, &task1_handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL(); //退出临界区
}
上一篇:19_系统内存管理
下一篇:stm32 IO口复用设置
- 移植FreeRTOS到STM32(嵌入式入门)
- STM32CubeIDE STM32F7+FreeRTOS+LWIP ping不通以及丢包问题
- STM32CUBEMX生成freeRTOS代码的时候出现警告
- 基于STM32创建FreeRTOS系统的详细流程
- STM32与FreeRTOS中的消息队列详解
- STM32 FreeRTOS移植详解(核心步骤指南)
- STM32实时操作系统FreeRTOS配置指南
- 在IAR使用FreeRTOS出现Error[Pa045]: function "XXX" has no prototype
- 17_freeRTOS 任务状态切换
- IAP15W4K58S4单片机中断系统详解与管理学习笔记
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
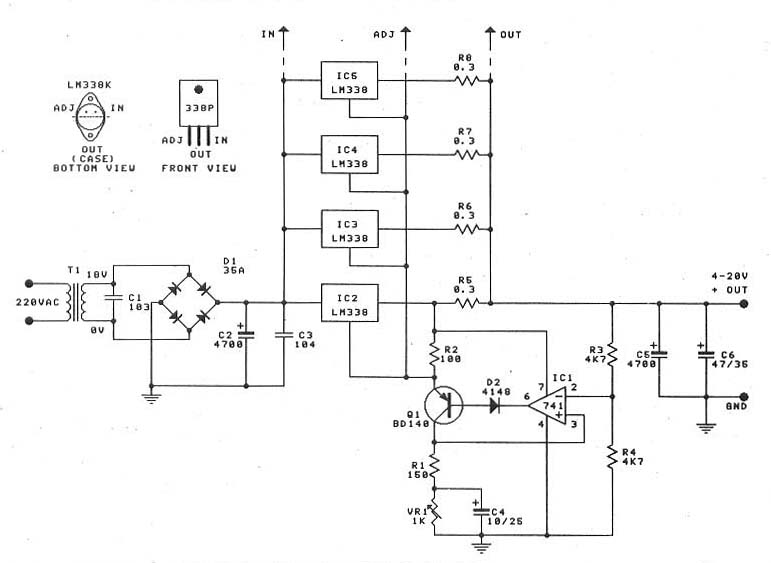
0-30V/20A 大功率稳压电源(采用LM338)