



机器人SuperLimbs,帮助宇航员在跌倒后站起来
2024-05-22 来源:OFweek机器人网
相比地球,月球环境对人类活动有着诸多约束和挑战。
“宇航员的身体非常有能力,但他们可以在月球上挣扎,那里的重力是地球的六分之一,但他们的惯性仍然是一样的。此外,穿宇航服是一个沉重的负担,会限制他们的行动“麻省理工学院机械工程教授HarryAsada说,“我们希望为宇航员提供一种安全的方式,让他们在跌倒时重新站起来。”
为了帮助宇航员在执行月球任务时减轻身体负担,同时能在遇到跌倒时迅速反应并提供援助,麻省理工学院的HarryAsada教授和他的团队开发了这款“SuperLimbs”机器人系统。其核心设计理念是为宇航员配备一对可穿戴的机器人臂,就像一双“超级肢体”一样,贴身协助宇航员完成各种操作。
这对机器人臂安装在宇航员背携的一个大型背包上,背包内还集成了控制系统、动力系统和宇航员的生命维系设备。机器人臂采用多关节设计,可根据需要伸展和收缩。当宇航员在执行任务时,这对机械臂就像人的手臂一样,可以借力为宇航员提供支撑或协助完成某些操作。当宇航员不慎跌倒时,控制系统能够准确预判并模拟人体自然恢复重心的过程,随即指挥机器人臂有序地将宇航员扶起,帮助其恢复直立姿态。
研究人员已经建立了一个物理原型并在健康受试者身上测试了一个初步版本,这些受试者也自愿穿着类似于宇航员宇航服的紧身衣。当志愿者试图从坐着或躺着的姿势站起来时,使用SuperLimbs省力得多。
根据获得的大量数据,他们设计出一套控制算法,用于指导机器人臂在不同场景下对宇航员的扶助动作。与此同时,对于硬件设计,研究团队还通过优化搜索等手段,寻求在满足工程约束条件下,能耗最小化且最大限度助力人体重心恢复的机构形态。
据悉,团队将在今年夏天于NASA的喷气推进实验室建造完整的SuperLimbs系统,并计划在那里简化设计,并使用先进的轻质材料最大限度地减少其零件和电机的重量,将四肢与宇航员服配对,并在低重力模拟器中进行测试,目标是有朝一日协助宇航员执行未来的月球和火星任务。
上一篇:前Cruise首席执行官再创业!
下一篇:上海外骨骼公司,完成数千万融资
-

直播回放: 如何使用MPLAB® Mindi™软件进行模拟电路仿真
-

直播回放: 开启 SDV 的未来:集成 TI 的远程控制边缘节点解决方案
-

直播回放: 2026 是德科技XR8新品发布: 一段跨越70年的示波器创新之旅
-

直播回放: 使用RUHMI模型转换器部署BYOM模型并进行MINST模型部署
-

直播回放: 使用Reality AI Tools 基于数据创建微小型AI模型以及进行拉弧检测开发实践
-

直播回放: MPS 赋能人形机器人 - 因为没有运动,机器人只是一尊雕塑
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
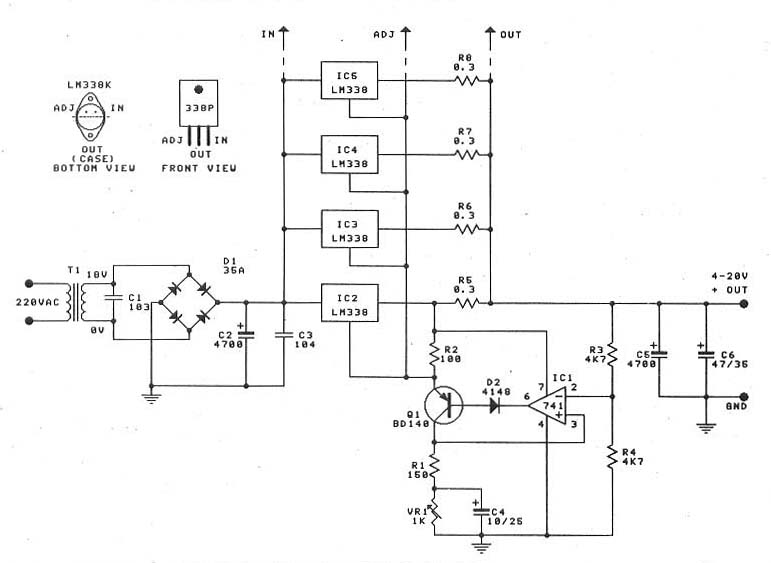
0-30V/20A 大功率稳压电源(采用LM338)