



22_BKP备份寄存器&RTC实时时钟
2025-09-04 来源:cnblogs
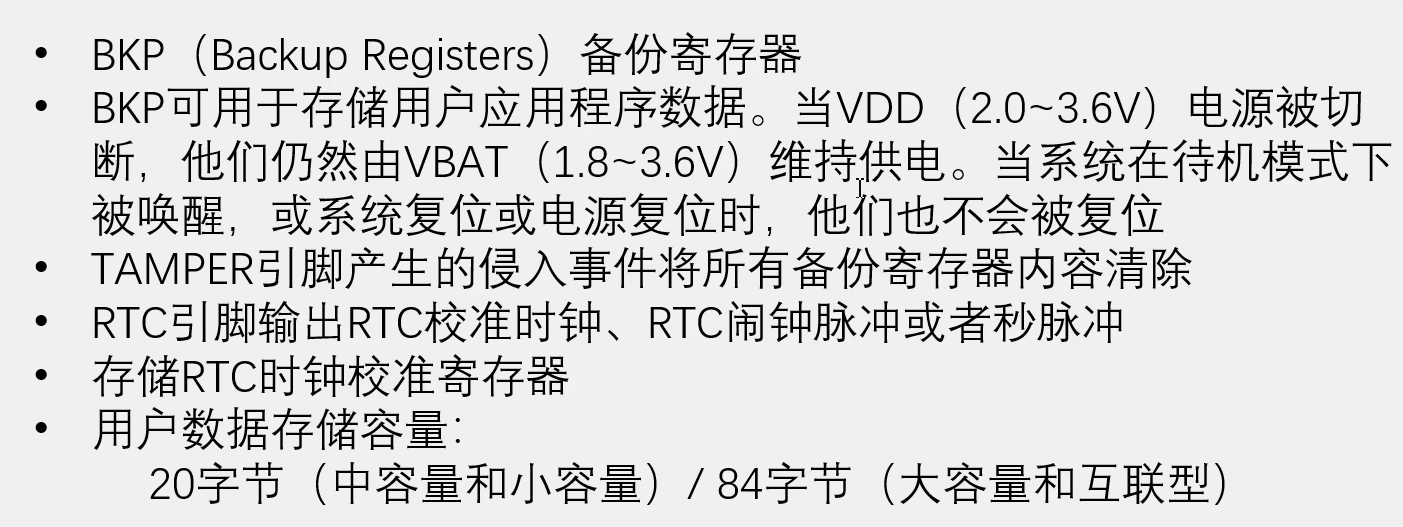
BKP简介
BKP基本结构
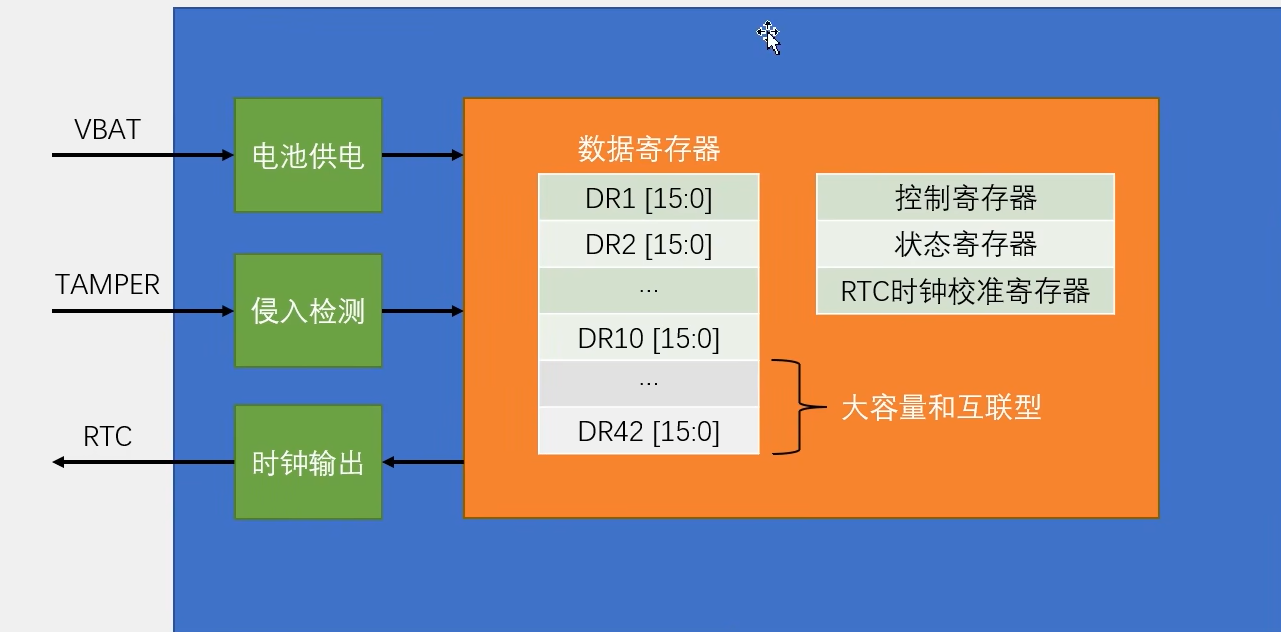
一个数据寄存器存2字节
RTC简介
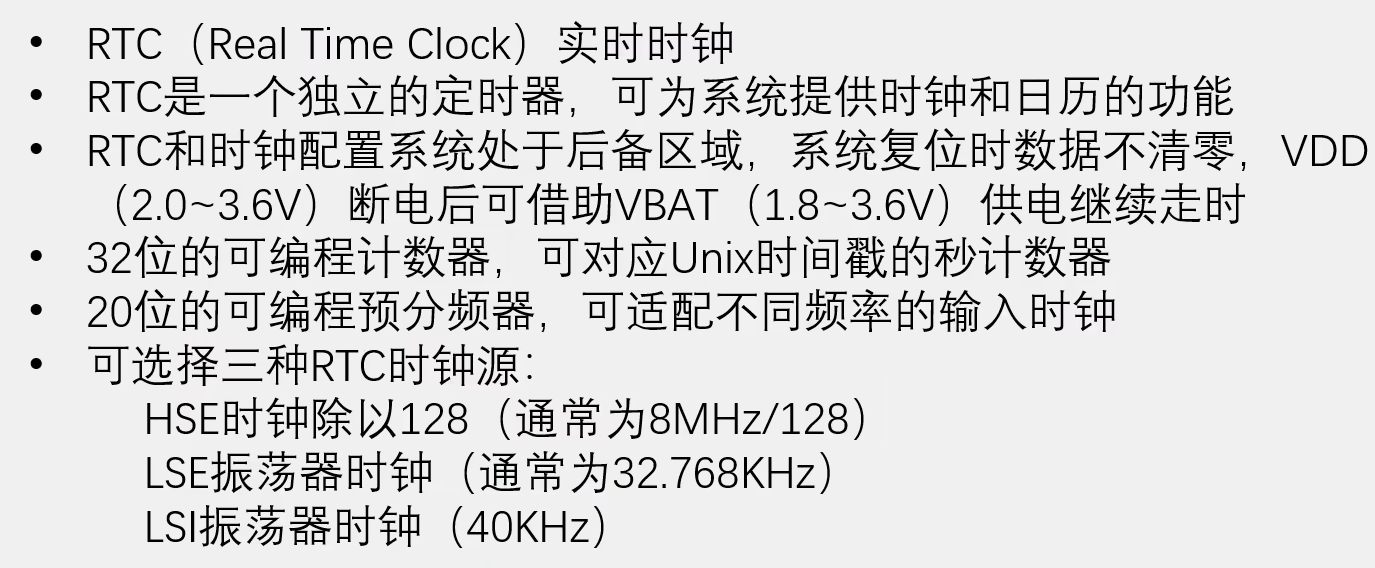
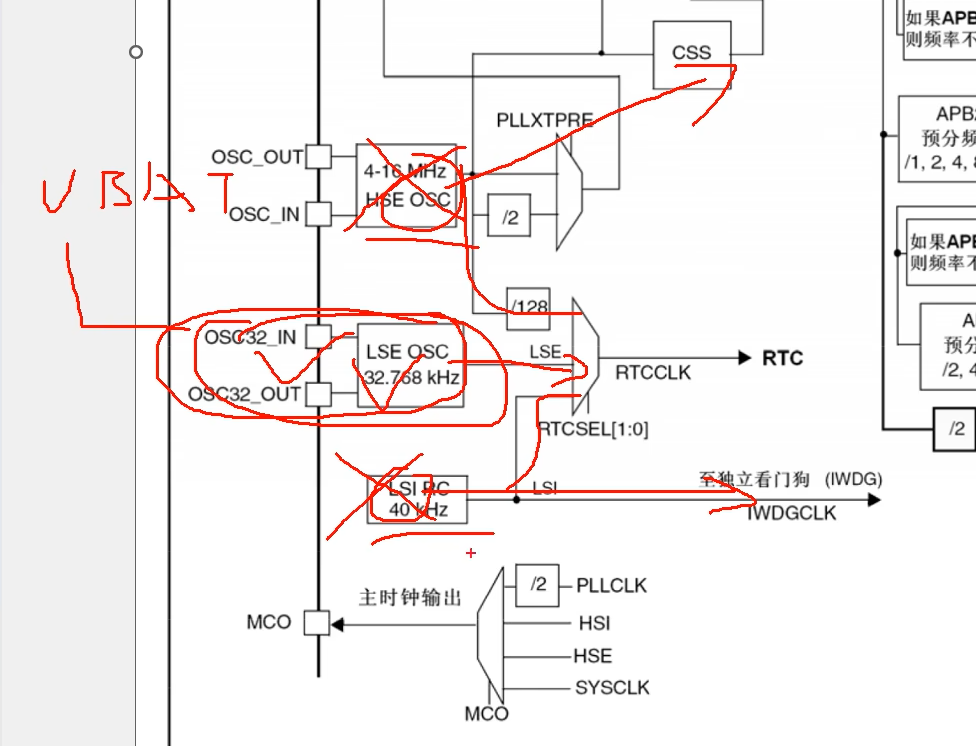
选LSE的32.768kHZ的时钟频率,因为支持VBAT供电
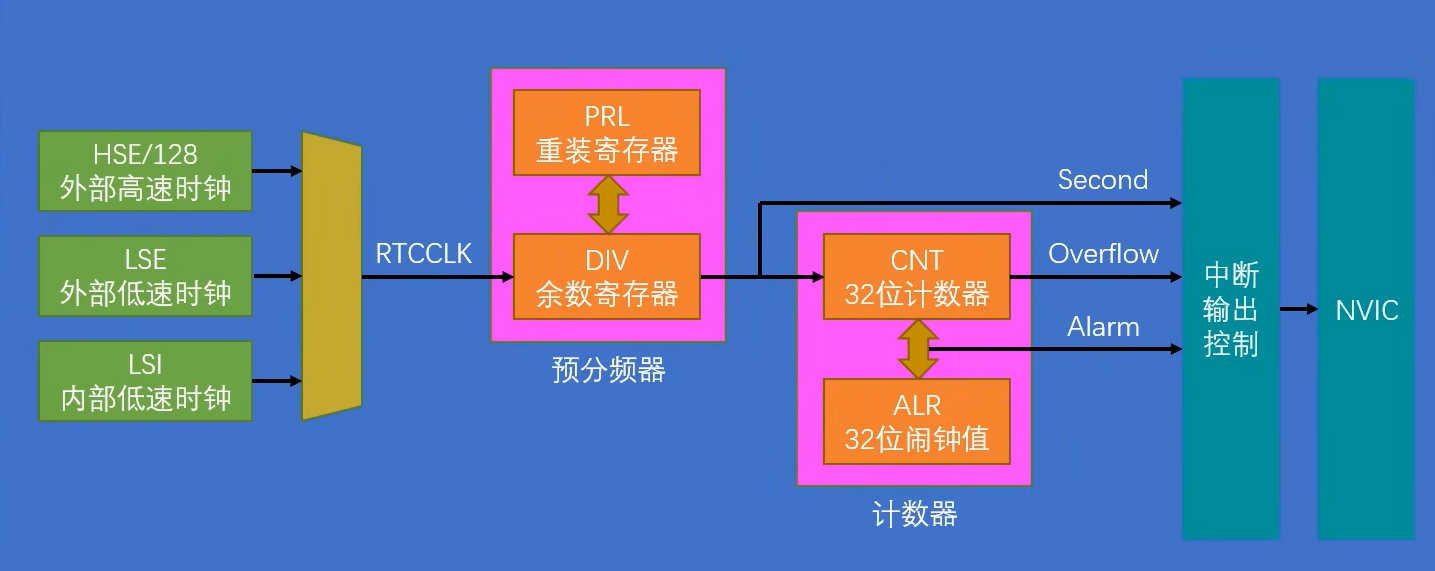
RTC框图
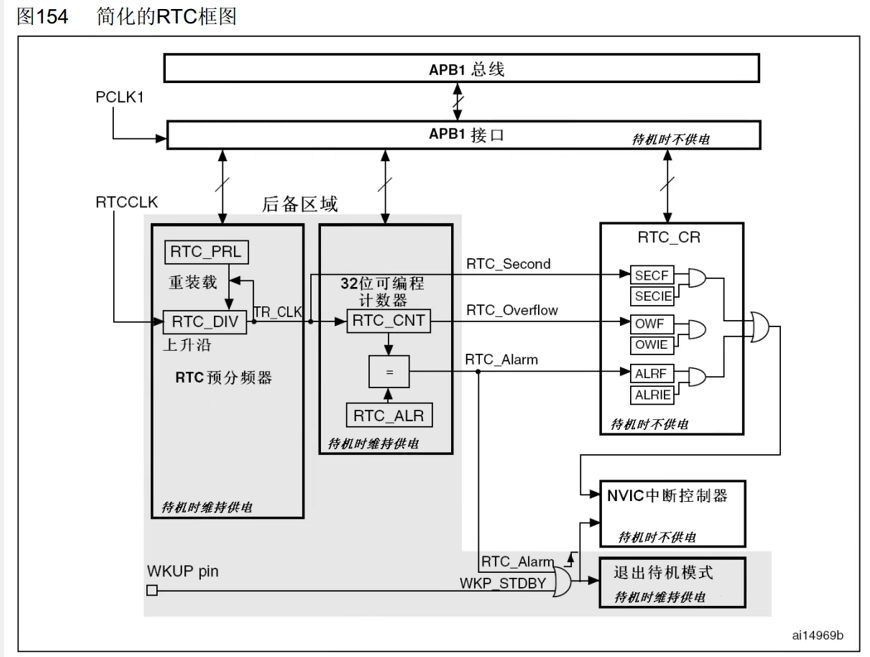
RTC基本结构
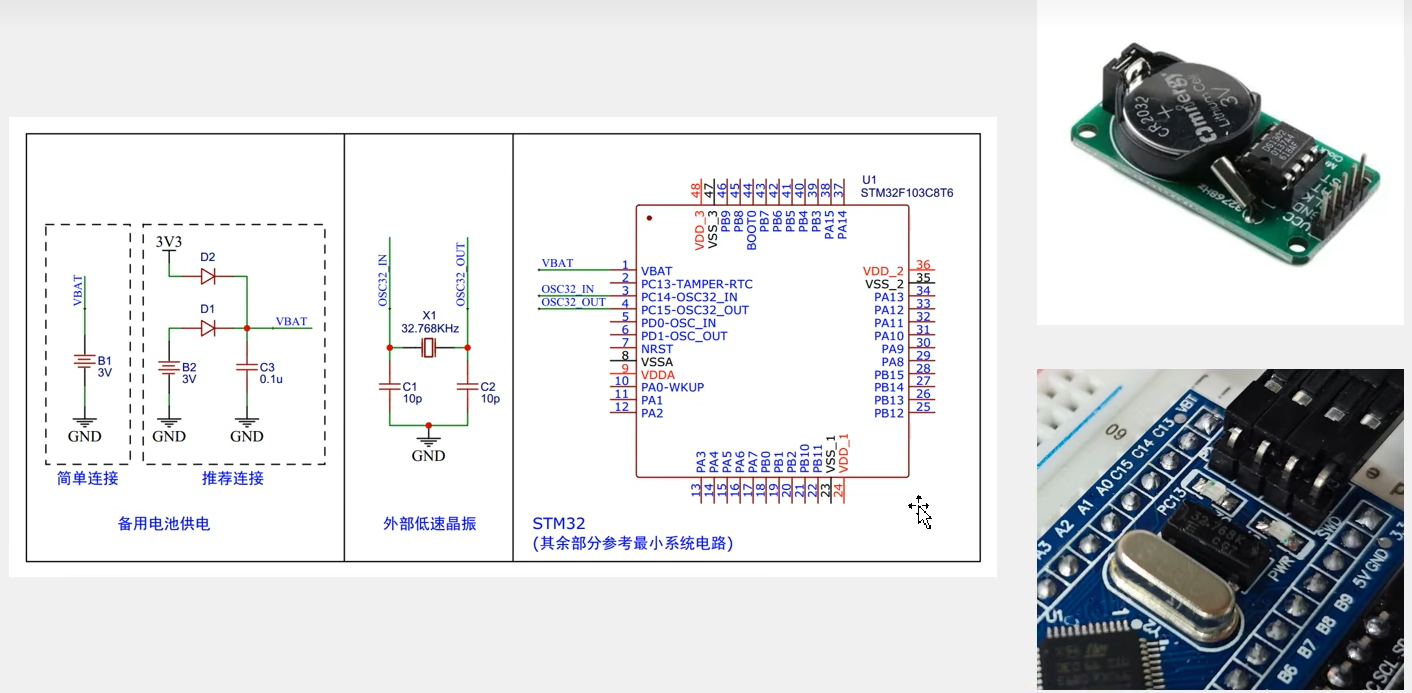
硬件电路
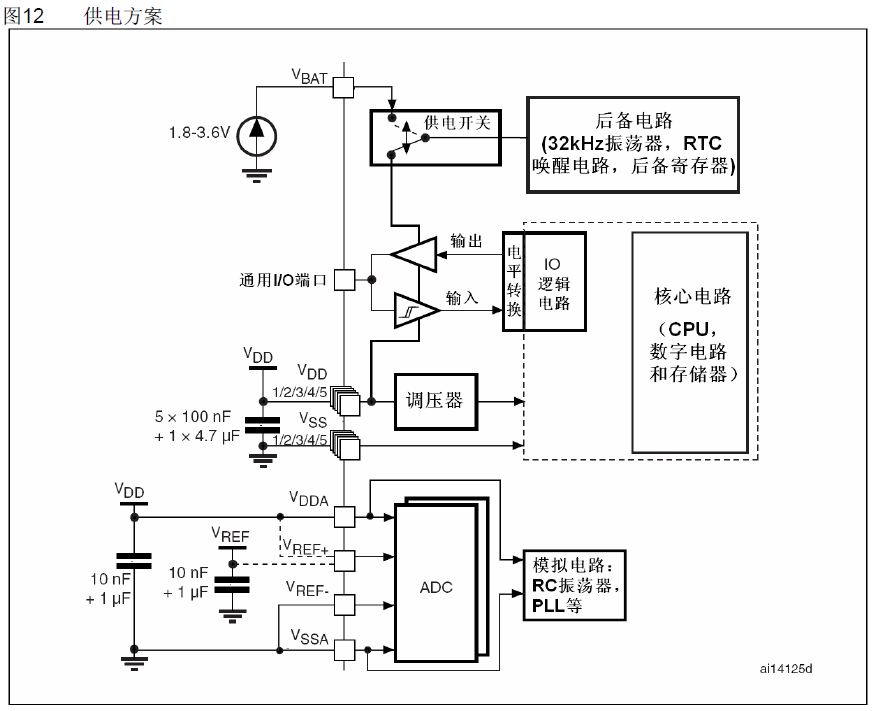
供电方案
RTC操作注意事项

读写备份寄存器
接线图

代码
main.c
#include 'stm32f10x.h' // Device header
#include 'Delay.h'
#include 'OLED.h'
int main(void)
{
OLED_Init();
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);
PWR_BackupAccessCmd(ENABLE); //使能对BKP和RTC的访问
BKP_WriteBackupRegister(BKP_DR1,0x1234);
OLED_ShowHexNum(1,1,BKP_ReadBackupRegister(BKP_DR1),4);
while(1)
{
}
}
RTC实时时钟
接线图
image-20240307154232991
代码
MyRTC.c
#include 'stm32f10x.h' // Device header
#include #include 'MyRTC.h' uint16_t MyRTC_Time[]={2023,1,1,23,59,55}; void MyRTC_Init(void) { RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE); PWR_BackupAccessCmd(ENABLE); if(BKP_ReadBackupRegister(BKP_DR1)!=0xA5A5) { RCC_LSEConfig(RCC_LSE_ON); while(RCC_GetFlagStatus(RCC_FLAG_LSERDY)!=SET); RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); RCC_RTCCLKCmd(ENABLE); RTC_WaitForSynchro(); //等待同步 RTC_WaitForLastTask(); //等待上一次写入操作完成 RTC_SetPrescaler(32768-1); //分频 RTC_WaitForLastTask(); MyRTC_SetTime(); BKP_WriteBackupRegister(BKP_DR1,0xA5A5); } else { RTC_WaitForSynchro(); //等待同步 RTC_WaitForLastTask(); //等待上一次写入操作完成 } } void MyRTC_SetTime(void) { time_t time_cnt; struct tm time_date; time_date.tm_year=MyRTC_Time[0]-1900; time_date.tm_mon=MyRTC_Time[1]-1; time_date.tm_mday=MyRTC_Time[2]; time_date.tm_hour=MyRTC_Time[3]; time_date.tm_min=MyRTC_Time[4]; time_date.tm_sec=MyRTC_Time[5]; time_cnt=mktime(&time_date); //秒数 RTC_SetCounter(time_cnt-8*60*60); RTC_WaitForLastTask(); } void MyRTC_ReadTime(void) { time_t time_cnt; struct tm time_date; time_cnt=RTC_GetCounter()+8*60*60; //转成北京时区 time_date=*localtime(&time_cnt); MyRTC_Time[0]=time_date.tm_year+1900; MyRTC_Time[1]=time_date.tm_mon+1; MyRTC_Time[2]=time_date.tm_mday; MyRTC_Time[3]=time_date.tm_hour; MyRTC_Time[4]=time_date.tm_min; MyRTC_Time[5]=time_date.tm_sec; } MyRTC.h #ifndef __MYRTC_H__ #define __MYRTC_H__ extern uint16_t MyRTC_Time[]; void MyRTC_Init(void); void MyRTC_SetTime(void); void MyRTC_ReadTime(void); #endif main.c #include 'stm32f10x.h' // Device header #include 'Delay.h' #include 'OLED.h' #include 'MyRTC.h' int main(void) { OLED_Init(); MyRTC_Init(); OLED_ShowString(1,1,'Data:xxxx-xx-xx'); OLED_ShowString(2,1,'Time:xx:xx:xx'); OLED_ShowString(3,1,'CNT :'); OLED_ShowString(4,1,'DIV :'); while(1) { MyRTC_ReadTime(); OLED_ShowNum(1,6,MyRTC_Time[0],4); OLED_ShowNum(1,11,MyRTC_Time[1],2); OLED_ShowNum(1,14,MyRTC_Time[2],2); OLED_ShowNum(2,6,MyRTC_Time[3],2); OLED_ShowNum(2,9,MyRTC_Time[4],2); OLED_ShowNum(2,12,MyRTC_Time[5],2); OLED_ShowNum(3,6,RTC_GetCounter(),10); OLED_ShowNum(4,6,RTC_GetDivider(),10); } }
上一篇:21_Unix时间戳
下一篇:01_数据结构
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
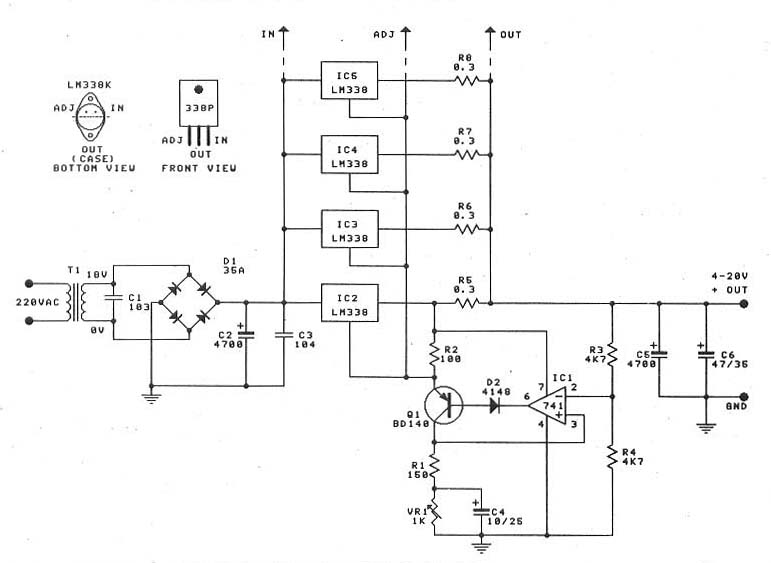
0-30V/20A 大功率稳压电源(采用LM338)