



STM32 USART学习
2025-11-06 来源:bilibili
USART(同步异步串口通信)
在STM32的参考手册中,串口被描述成通用同步异步收发器(USART),它提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。USART利用分数波特率发生器提供宽范围的波特率选择。它支持同步单向通信和半双工单线通信,也支持LIN(局部互联网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。还可以使用DMA方式,实现高速数据通信
STM32 中的USART框图
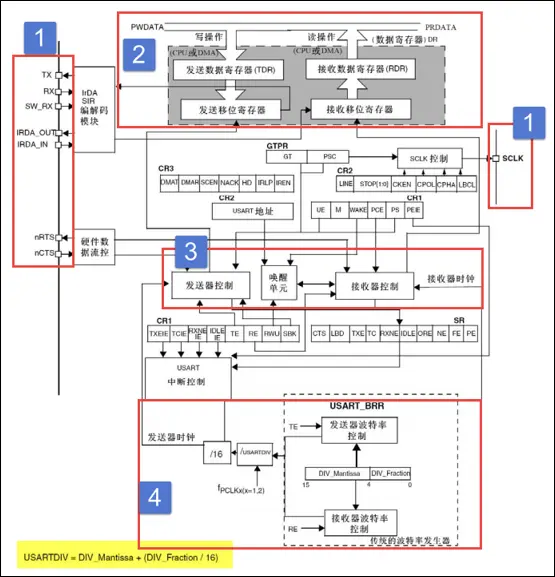
框图
1、引脚编号
TX:发送数据输出
RX:接收数据串行输入
SCLK(位于最右边):发送器时钟输出,仅同步通信时使用
nRTS:请求发送(Request To Send)
nCTS:允许发送(Clear To Send)
SW_RX:数据接收引脚,属于内部引脚。
2、数据寄存器
数据寄存器(USART_DR)只有低9位有效,实际上它包含一个发送数据寄存器USART_TDR和一个接收数据寄存器USART_RDR。TDR和RDR都是介于系统总线和移位寄存器之间。这里比较特别:一个地址对应了两个物理内存。
当进行发送操作时,往USART_DR写入数据会自动存储在 TDR内,然后把内容转移到发送移位寄存器,最后通过模块发送到TX引脚;
当进行读取操作时,信息从RX引脚进入,通过模块后存入接受移位寄存器,然后把内容转移到RDR内,最后USART_DR提取RDR数据。
3、控制器
USART有专门控制发送的发送器、控制接收的接收器,还有唤醒单元、中断控制等。
控制寄存器1(USART_CR1)的TE位负责使能发送器,发送器就会“叫醒”发送移位寄存器。
控制寄存器1(USART_CR1)的RX位负责使能接收器,接收器就会“叫醒”接收移位寄存器。
控制寄存器1的TXEIE或RXNEIE置1可以产生中断。
控制寄存器1其他位:TXE:发送移位寄存器为空,发送单个字节时使用。TC:发送完成,发送多个字节数据时候使用。TXIE:发送完成中断使能。
控制寄存器1的M位设置的是字长,该位定义了数据字的长度,由软件对其设置和清零。设置0:一个起始位,8个数据位;设置1:一个起始位,9个数据位。之前已经说过,数据寄存器(USART_DR)只有低9位有效,并且第9位数据是否有效要取决于控制寄存器1的M位设置。
控制寄存器2(USART_CR2)的STOP[1:0]位用于设置停止位,可选0.5个、1个、1.5个、2个停止位。默认使用1个停止位。2个停止位适用于正常USART模式、单线模式和调制解调器模式。0.5和1.5个停止位用于智能卡模式
4、波特率
通过波特率寄存器(USART_BRR)可设置波特率。由于计算出的分频因子有小数,因此寄存器分为两个部分:
DIV_Mantissa[11:0]:USARTDIV的整数部分,这12位定义了USART分频器除法因子(USARTDIV)的整数部分。
DIV_Fraction[3:0]:USARTDIV的小数部分,这4位定义了USART分频器除法因子(USARTDIV)的小数部分。
波特比率的计算公式为:
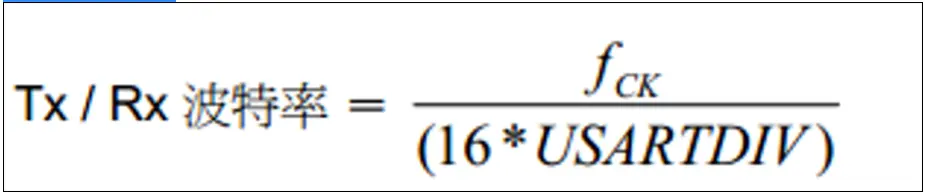

但开发中调用库函数只需调用库函数
USART.c
#include "USART.h" // Device header
#include "stdio.h"
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置 USART 为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* 抢断优先级为 1 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级为 1 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置 NVIC */
NVIC_Init(&NVIC_InitStructure);
}
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口 GPIO 的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将 USART Tx 的 GPIO 配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将 USART Rx 的 GPIO 配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到 USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do {
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while (*(str + k)!='�');
/* 等待发送完成 */
while (USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET) {
}
}
/*中断服务函数和串口初始化*/
void USART_init(void ){
USART_Config();
NVIC_Configuration();
}
/*中断服务函数*/
//void DEBUG_USART_IRQHandler(void)
// {
// uint8_t ucTemp=1;
// if (USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
// {
// ucTemp = USART_ReceiveData( DEBUG_USARTx );
// USART_SendData(USART1,ucTemp);
//
// }
//
// }
USART.h
#include "stm32f10x.h"
#ifndef __USART_H_
#define __USART_H_
/**
* 串口宏定义,不同的串口挂载的总线和 IO 不一样,移植时需要修改这几个宏
*/
// 串口 1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 9600
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch);
/***************** 发送一个字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str);
void USART_init(void );
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "USART.h" // Device header
int main(void)
{
OLED_Init();
OLED_ShowString(1, 3, "USART_TEST");
USART_init();
Usart_SendByte(USART1 ,0x41);
Usart_SendByte(USART1 ,0x45);
while (1)
{
Usart_SendString(USART1,"abcdn");
Delay_ms(1000);
}
}
void DEBUG_USART_IRQHandler(void)
{
uint16_t ucTemp;
if (USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
{
ucTemp = USART_ReceiveData( DEBUG_USARTx );
USART_SendData(USART1,ucTemp);
OLED_ShowString(2,6,"ok!");
OLED_ShowString(3,1,"test successful");
}
}
- 意法半导体中国本地造STM32微控制器启动规模量产
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 基于机智云与STM32的智能拐杖安全监测系统在养老物联网中的应用
- 内置全栈安全,一站式满足CRA法案与IEC 62443标准——米尔STM32MP257核心板
- 如何用 STM32 FLASH 实现等效 100 万次擦写的 EEPROM 功能?
- 实战解析:通过一个小项目掌握STM32所有外设
- STM32学了两年半,却还是不会做项目
- 意法半导体推出最新STM32MP21微处理器,兼具高性价比、低功耗、高灵活性
- 基于STM32的矿井作业环境监测系统设计与实现
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外遥控音量控制
-

LM317过压保护
-

12V转110V/220V 500W逆变器
-

DS1669数字电位器