



51单片机红外遥控信号解码
2025-09-23 来源:cnblogs
简介
红外遥控作为一种遥控手段应用是非常广泛的,并且红外线遥控装置具有体积小、 功耗低、 功能强、 成本低这些特点,在录音机、空调、音响等小型电器大多是采用红外遥控的方式进行控制。这篇文章我就来详细讲解一下红外遥控信号的解码方法,对于红外信号的收发原理在这里只做简单了解。红外遥控系统要有发射端和接收端,发射端将信号经芯片调制后由红外发光二极管将信号以红外光的形式发送出去。接收端通过红外监测二极管接收到红外信号后再经过放大、滤波、解调等操作输出高低电平,这样就完成了红外信号的收发。本次教程我选择下图这种红外遥控器进行红外信号的发射

选择一体化红外接收头作为红外信号的接收端,这是一种特殊的红外接收电路,它把红外接收管和放大电路集成到了一块,从外形上看只有一个三极管大小,如图

一体化红外接收头共有三个引脚,将有凸起的一面对准自己后从左到右依次是信号输出、GND、VCC,它的工作电压为5V,可以选择一体化红外接收模块,我们在使用的时候只需要给它接上5V电源,接地,然后将信号输出脚连接到单片机就可以使用了。本篇文章我使用51单片机进行试验,51单片机用来解码红外信号是足够的并且易于理解,文章主要是讲解解码原理。
硬件连接
第一步是硬件连接,用到的硬件非常简单,只有一体化红外接收头和单片机最小系统。首先,我们给单片机最小系统和红外接收头接上电源,注意共地,然后将红外接收头的信号输出脚接到单片机的外部中断引脚上,这样就完成了硬件的连接。之所以将信号输出脚接到单片机的外部中断引脚是因为前面说过红外接收头在接收到红外信号后会输出高低电平,接在外部中断引脚后单片机可以在有信号的时候快速做出反应,后面的程序也是靠中断程序实现的。
NEC协议
前面讲过红外接收头在接收到红外信号后会输出高低电平,然后就可以通过我们的程序分析电平的变化来识别接收到的信号的内容。要将接收端的信号解码我们就要知道发送端的数据是如何编码的,在本文中用到的红外遥控器所使用的是NEC编码协议,所以我们首先要讲解一下NEC协议的相关信息。NEC协议是用于红外通信中的一种协议,通过NEC协议发送信息的格式如下图:

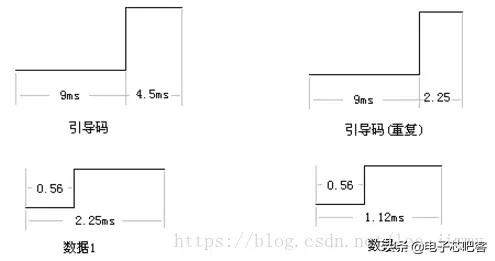
信息的开始是9ms高电平加4.5ms低电平的引导码,作用就是告诉设备通讯开始,有信号发送过来了。之后接的是8位地址码和8位地址反码,地址码的作用就是区分不同的接收器件,实现单独控制某个器件。最后是8位数据码和8位数据反码,数据码就是功能码,我们可以给不同数据码设定不同的功能,反码的作用就是检验接收到的数据是否正确。在上面的这条信息里,‘0’是用560us高电平加560us低电平表示的,‘1’是用560us高电平加1680us低电平表示。要注意的是上面的波形图是发射端的波形,我们红外接收端收到的信号的高低电平是与上图相反的,还要注意发射端在发射数据是是从最低位开始发射,所以我们接收到的信号也是从最低位开始的,另外当我们持续按住同一个按键时,发射端并不会重复发送地址码和数据码而是在发送完一次后每隔一段时间发送一次引导码(重复),间隔时间大约是108ms。下图为接收端引导码、引导码(重复)、‘0’、‘1’的波形:
在了解了这些关于NEC协议的信息后我们就可以开始写程序控制单片机来解码红外信号了。首先我来讲解一下解码程序的思路,之前我们将红外接收头的信号输出脚接在了单片机的外部中断引脚上,我们将外部中断的触发方式设置为跳变沿触发,当接收头接收到信号后就会输出一个低电平,低电平触发外部中断,我们在中断程序中启动定时器,这样当下一次低电平触发中断前,在这期间定时器所定的时间我们可以进行比较从而确定脉冲的宽度,确定数据为‘0’还是‘1’。接下来我根据具体代码进行介绍,

在上面这段函数中我们添加上相应的头文件和一些宏定义,之后我们定义一些变量和数组作为一些标志位以及一些数据的保存,在每个定义后面都有注释来解释相应的作用,在这里就不再赘述。

然后我们定义一个初始化函数用于定时器和中断的初始化设置,我们将定时器0用于计算红外信号高低电平的时间,将定时器1用于串口发送数据。

上面这段是定时器0的程序,在里面只是用来计算时间,定时器0中断一次是277.76us,我们通过IRtime就可以计算出红外信号的持续时间。

上面这段程序是外部中断的处理程序,当红外接收头接收到红外信号后会输出相应的高低电平变化,引导码和“1”、“0”的波形在前面的接收端波形图已经画出,这样当接收端为高电平的时候,就会触发外部中断,这是会查看IRtime的值,根据这个值来判断是否是9ms的引导码,如果是引导码则先将IRtime清零,然后将以后的脉冲时间都保存下来,如果不是则把IRtime清零,这样红外接收头接收到的33次脉冲的宽度就会保存到IRdata[]数组里。

上面这个函数是用来处理我们之前保存的33次脉冲宽度,并且转化为4字节的数据保存在IRcord[]数组里,具体的操作就是根据脉冲的时间来判断是“1”还是“0”,大家可以根据程序后面的注释来理解函数的内容。

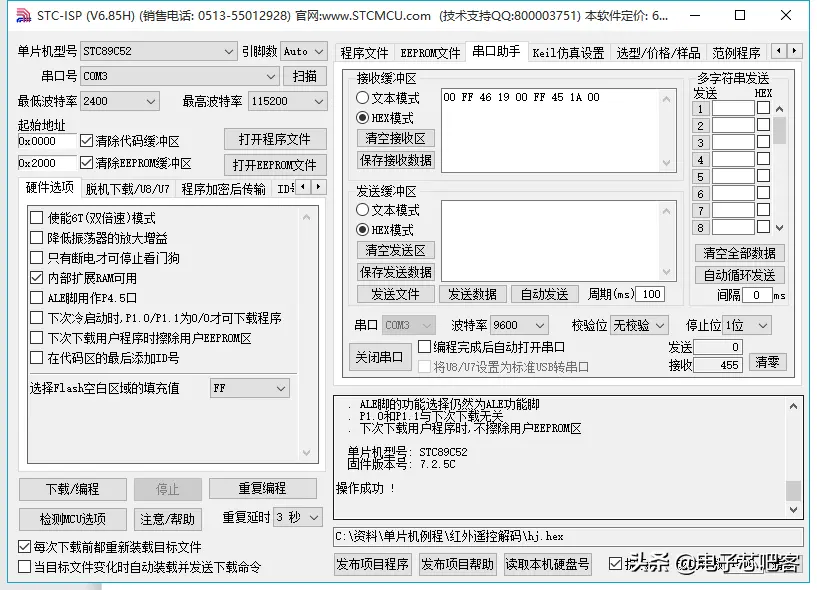
最后我们在主函数部分调用之前的函数,并且在等待解码完成后将解码出来的4字节数据通过串口发送到电脑。最后我们看一下实际的效果,首先打开串口助手,波特率设置为9600,接收设置为HEX模式,这样当按下红外遥控器的按键时,就会返回遥控器的键值了,
上一篇:51单片机的C语言基本用法
下一篇:51单片机C4炸弹编程
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外遥控音量控制
-

LM317过压保护
-

12V转110V/220V 500W逆变器
-

DS1669数字电位器