



控制机器人通用控制步骤
2024-08-22 来源:elecfans
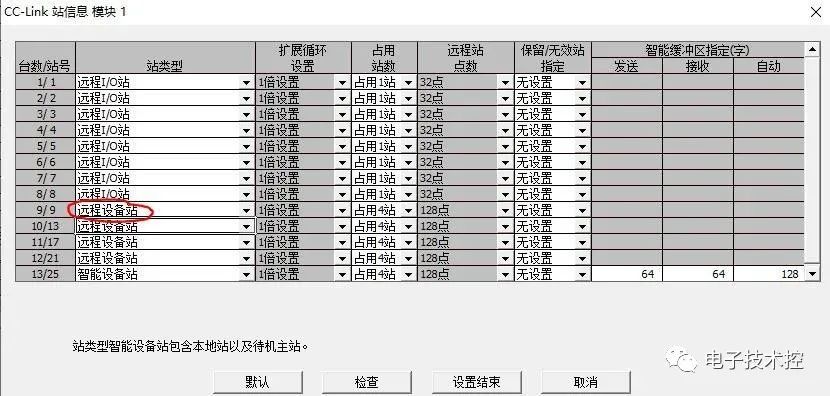
机器人的控制方法不胜枚举,本文以三菱PLC用CC-LINK方式控制机器人为例,简单地讲述一下通用控制步骤。 1.设置参数 主要设置好CC-LINK相关参数。 ①.PLC侧:设置站号、站类型(远程设备站)、占用站数(占用4站)
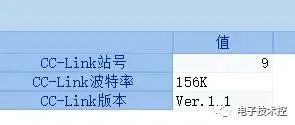
PLC侧CCLINK设置 ②机器人侧:设置站号、波特率等
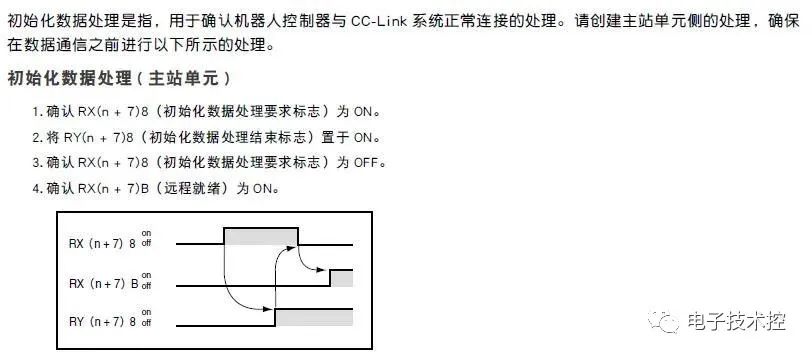
机器人侧设置 2.通讯测试 参数设置完成后断电重启,进行CC-LINK初始化数据处理。
数据初始化 3.输入/输出分配&数据交互 PLC与机器人输入输出分配:包含远程→主站 主站→远程 ①.专用输入&输出设置
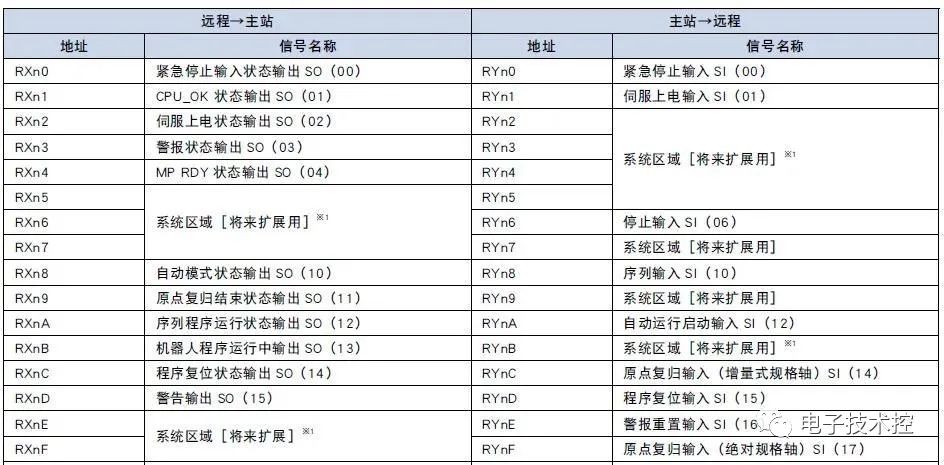
专用输入输出 ②.通用输入&输出设置
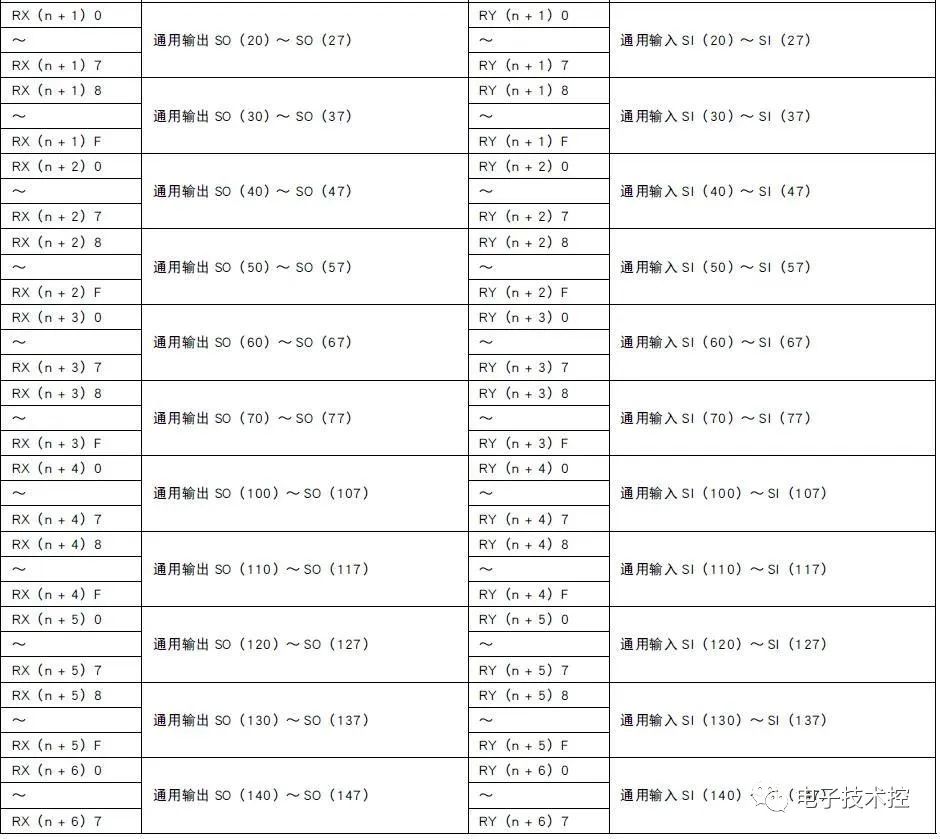
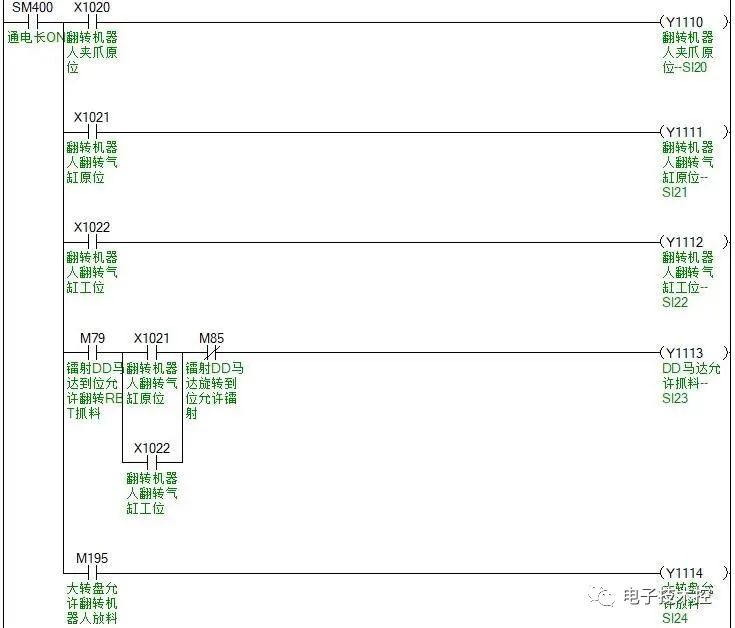
通用输入输出 4.PLC交互信号程序编写 ①.专用信号交互
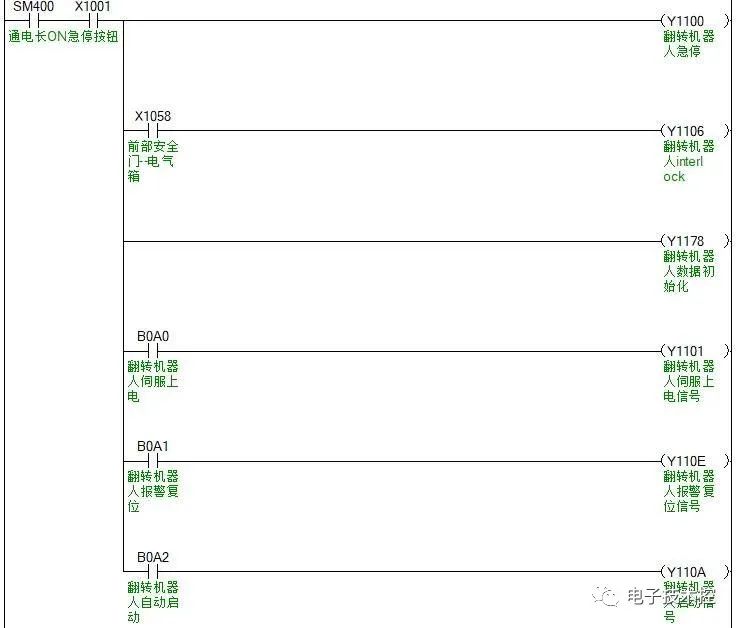
专用信号 ②.通用信号交互
通用信号 5.人机操作画面制作 伺服开启:控制机器人伺服上电; 报警复位:报警解除; 自动启动:伺服上电后可启动; 一键停止:停止机器人; 程序复位:程序复位到第一步。

人机操作控制 6.安全程序&报警程序编写 安全程序和报警程序编写,确保机器人动作安全可靠。
YAMAHA机器人
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- Mujoco中添加Apriltag标签并实现相机识别教程
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- 莱迪思加入英伟达 Halos生态系统,通过Holoscan传感器桥接技术提升物理人工智能安全性
- 芯科科技闪耀2026嵌入式世界展 以Connected Intelligence赋能,构建边缘智能网联新生态
- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
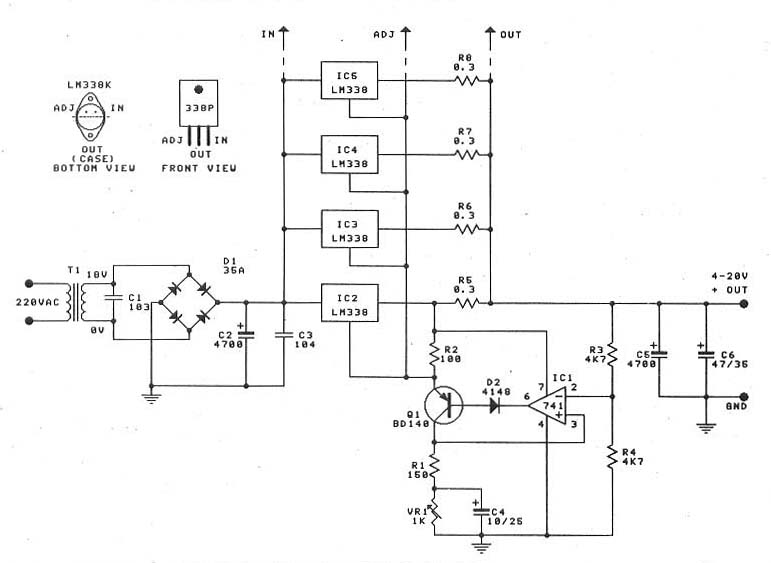
0-30V/20A 大功率稳压电源(采用LM338)