



华维实战小项目:教你如何用51单片机驱动步进电机
2025-10-23 来源:bilibili
前言
步进电机是一种无刷电机,可将电脉冲转换为机械旋转。顾名思义,它根据输入脉冲逐步旋转,是现代数字程序控制系统中的主要执行元件。
步进电机相比其他电机来说,一般具有5个比较明显的特征:
第一,可实现精细,正确的定位
第二,可通过脉冲信号简单控制
第三,体积小型,高转矩
第四,可自行保持停止位置
第五,可进行大惯性负载
广泛应用于工业、医疗、消费电子应用。简而言之,用于任何需要精确旋转或定位对象的地方。
在单片机领域应用比较广泛,在此和大家分享一个小项目。
-操作
步进电机内部线圈原理图:
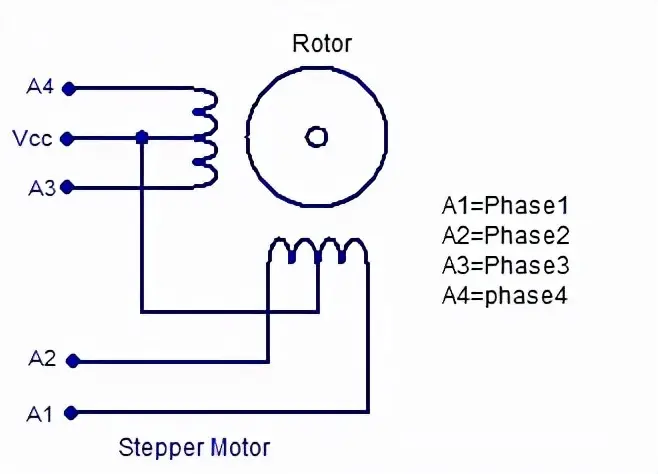
步进电机通常具有多个励磁线圈(相)和一个带齿转子。电机的步长由相数和转子上的齿数决定。步长是转子一步的角位移。比如一个步进电机有 4 相 50 个齿,则转一圈需要 50×4=200 步。因此步距角为 360/200=1.8°。
本次使用的步进电机有 4 极和一个 1/64 减速齿轮机构,用于增加扭矩。电机的步距角为 5.64°。但在考虑减速齿轮,输出轴的步距角为5.64/64°。

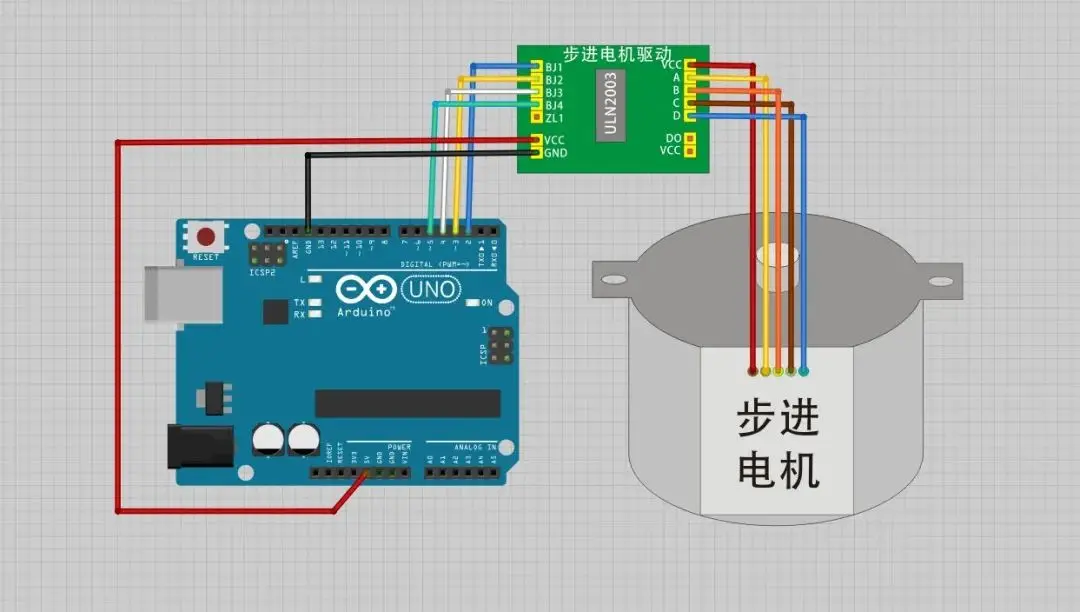
电路原理图:
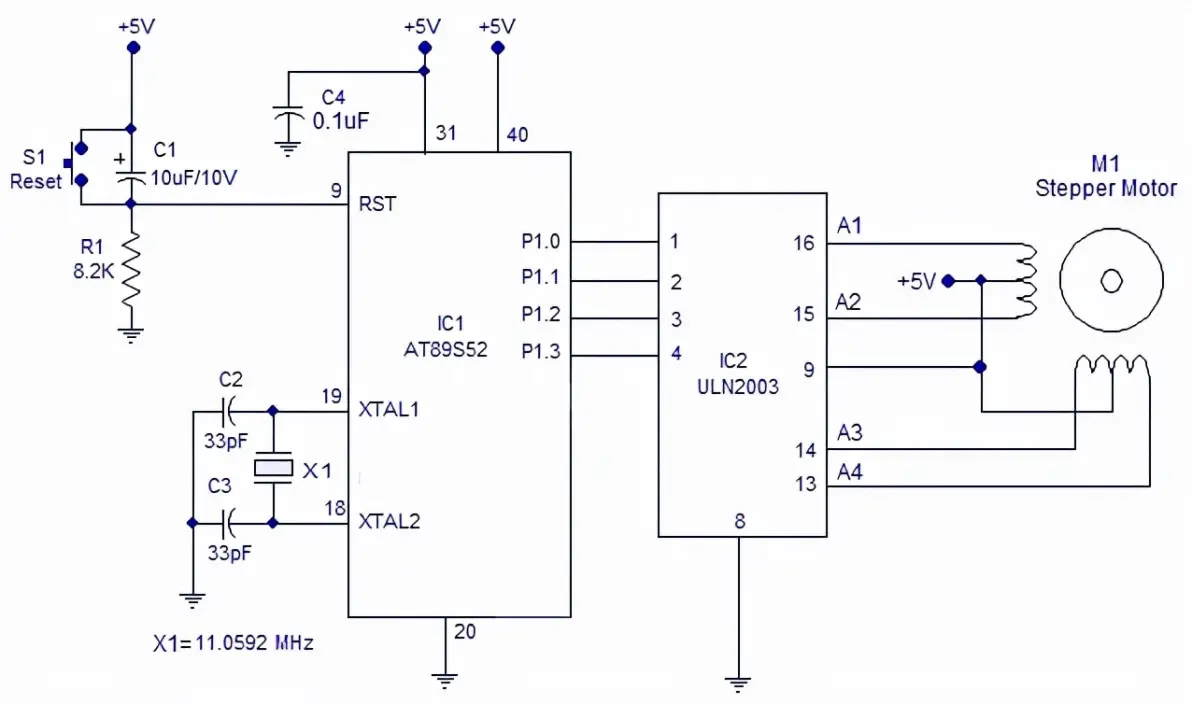
将步进电机按照电路图连接到 8051 的P1.0、P1.1、P1.2 和 P1.3 引脚分别用于控制步进电机的 A1、A2、A3 和 A4 相。ULN2003 用于驱动步进电机的各个相位。
ULN2003 是一种达林顿晶体管阵列,用于驱动继电器和电机等大电流负载。ULN2003 有 8 个单独的通道,每个通道的容量为 1A,通道可以并联以增加电流容量。每个通道都配有单独的续流二极管,通道通过提供逻辑低电平来激活。例如,我们将 ULN2003 的引脚 1 设为低电平,则步进电机的 A1 接通。
程序设计

按照上图的引线顺序,按时序循环给A1、A2、A3、A4相应的控制。
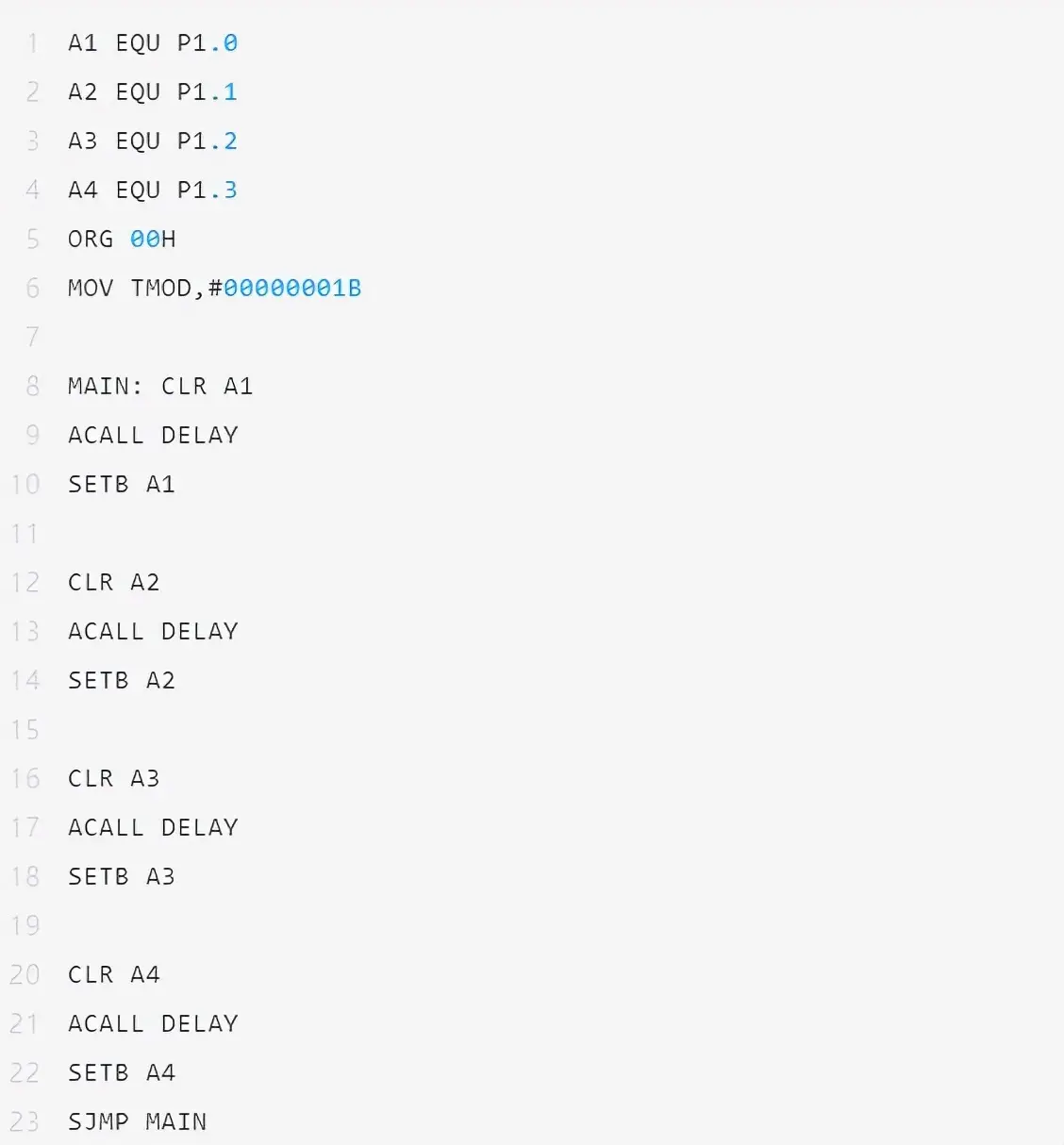
程序首先将 P1.0 清零以启动步进电机(A1),此状态保持 65ms,然后设置 P1.0 为1以停用电机的第 1 相。然后对 P1.1 到 P1.3 重复相同的过程,并一遍又一遍地重复整个循环,使电机沿顺时针方向旋转。
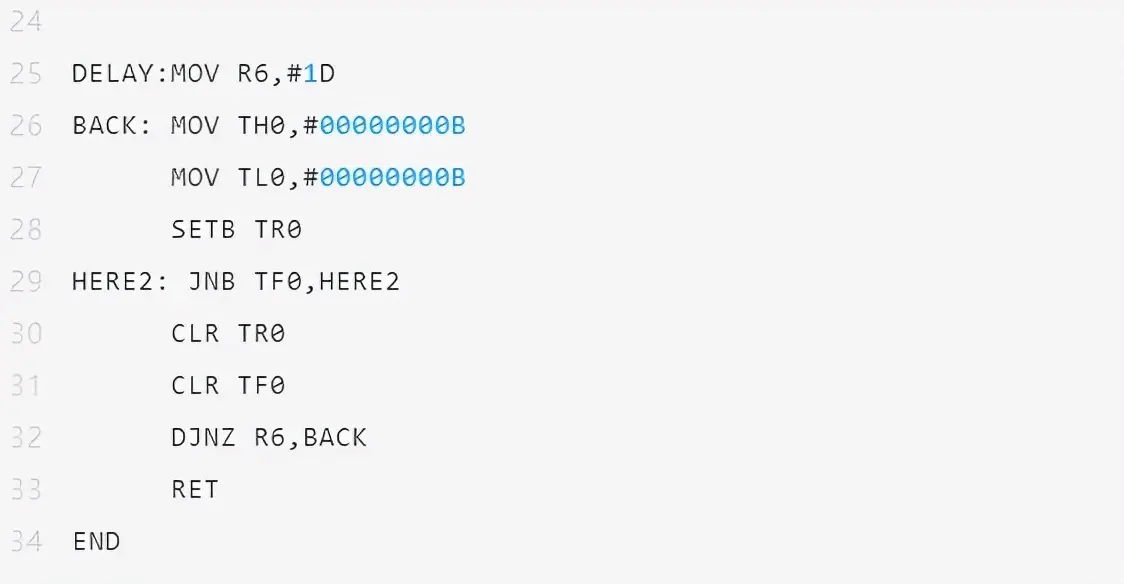
将定时器 0 配置为模式 1,用于产生 65 毫秒的延迟。65ms 是每个控制脉冲的宽度。
结束
这个小项目非常简单,主要是电机控制在单片机项目中太常见了,很有必要掌握。希望通过这个分享能帮助到有需要的同学。
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
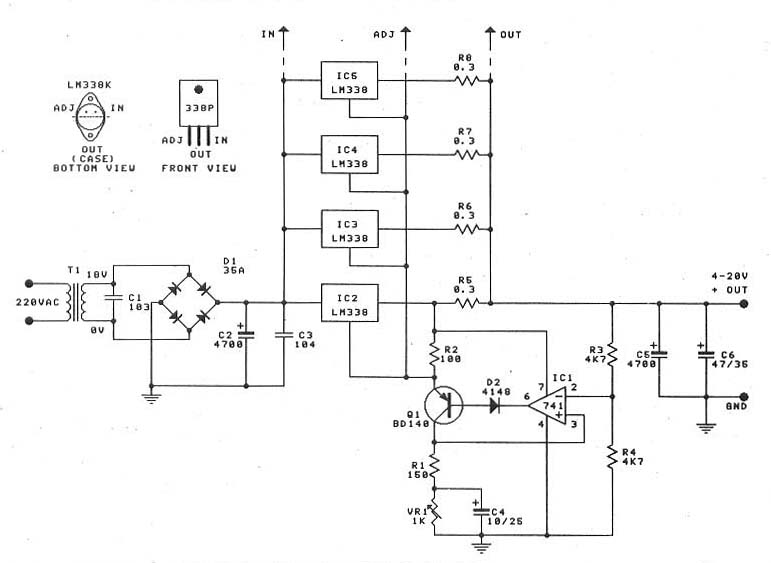
0-30V/20A 大功率稳压电源(采用LM338)